Seven-degree-of-freedom external skeleton type teleoperation main hand
An exoskeleton and degree of freedom technology, which is applied in the direction of manipulators, program-controlled manipulators, joints, etc., can solve the problems of complex robot motion mapping, heavy human burden, and large inertia, and achieve the effect of compact structure, less fatigue, and adjustable size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0024] Below in conjunction with accompanying drawing, the present invention is further described in detail:
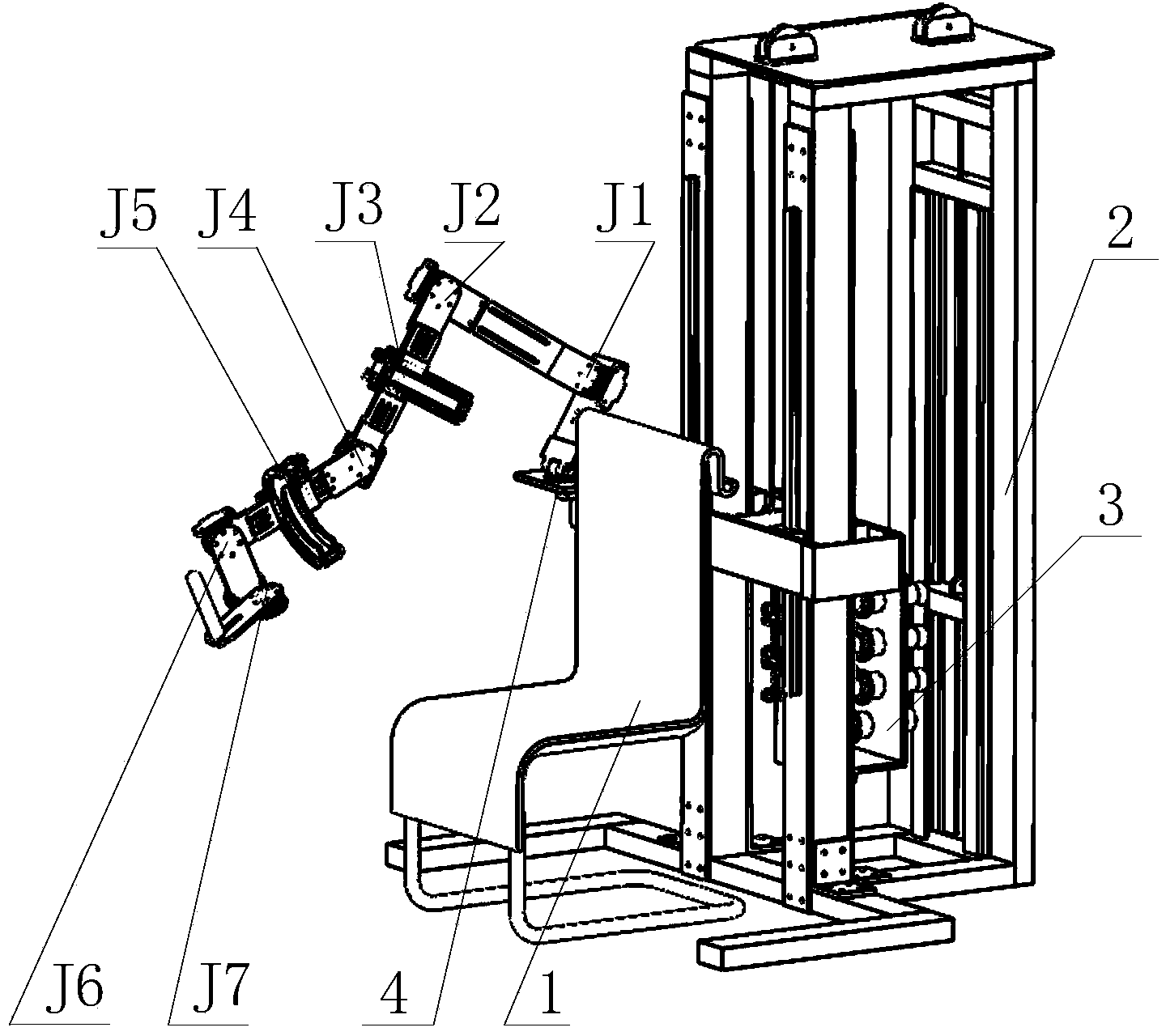
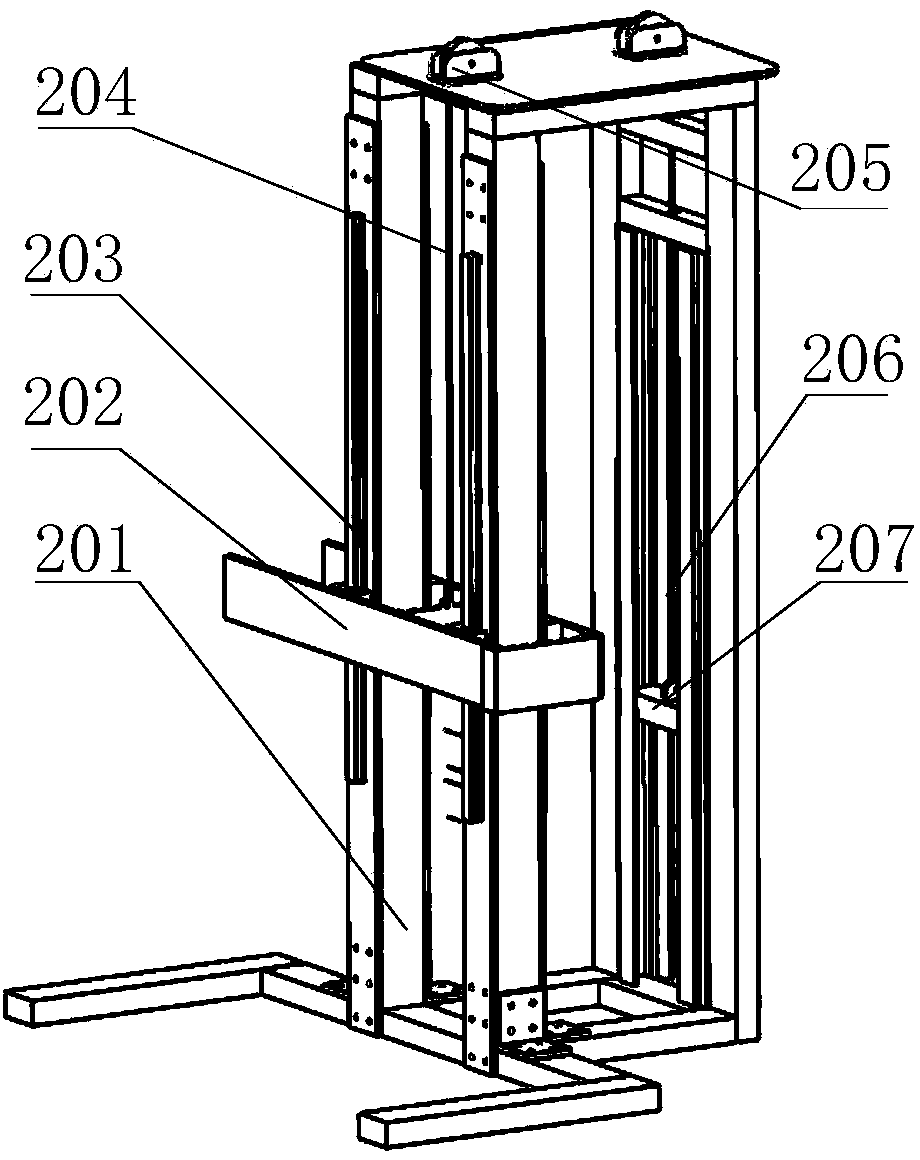
[0025] The present invention is an exoskeleton type teleoperation main hand device, and the arm wearing part has seven degrees of freedom. figure 1 Shown is the overall structure of the device. The exoskeleton type remote operation main hand device of the present invention is composed of support (2), drive unit (3), exoskeleton main hand ( Figure 4) consists of three parts. Wherein, the main hand part of the exoskeleton is divided into a singular configuration adjustment unit (4) and an arm wearing part. According to the principle of anthropomorphic design, the arm wearing part adopts a series structure and is worn on the upper arm of the operator, including the shoulder, elbow, and wrist. There are seven rotational degrees of freedom in total, and each rotational degree of freedom is distributed sequentially. Among them, the shoulder has three rotational degrees ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com