A deep sea operation type rov control system and control method thereof
A control method and control system technology, applied in the deep sea operation ROV control system and its control field, can solve problems such as complex mission planning, and achieve the effects of easy system maintenance, high intelligence, and good stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described below in conjunction with accompanying drawing:
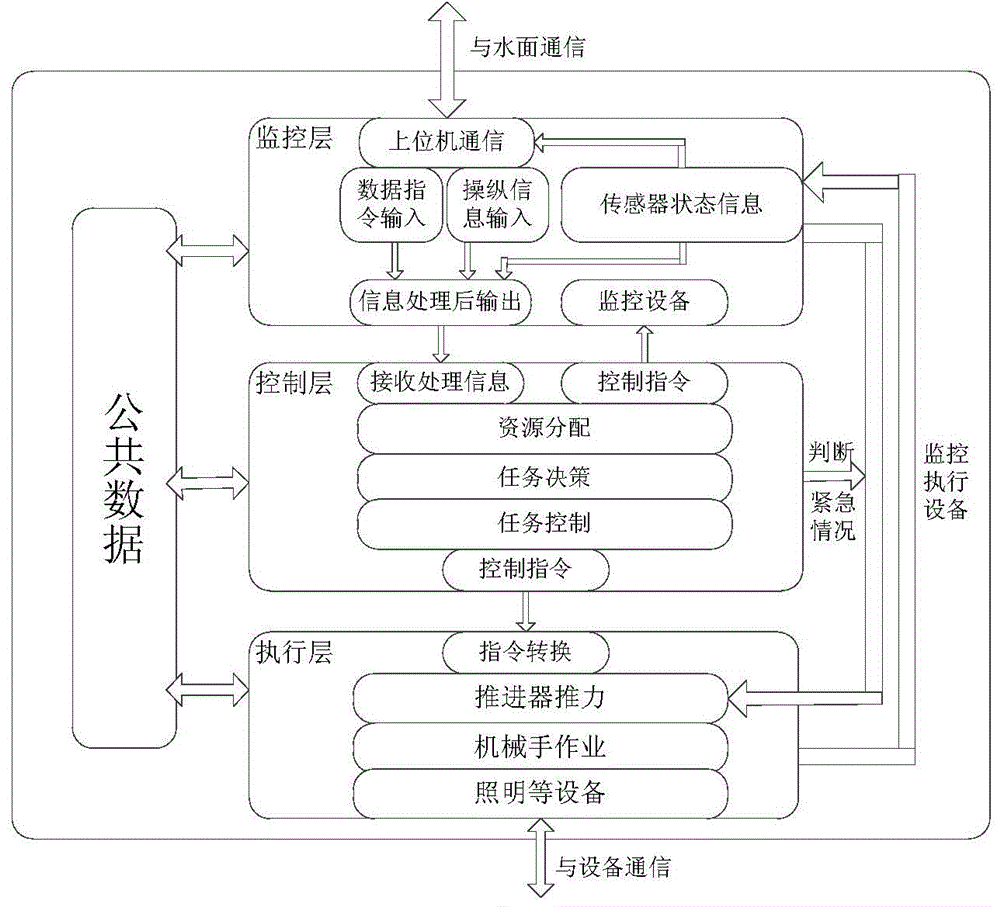
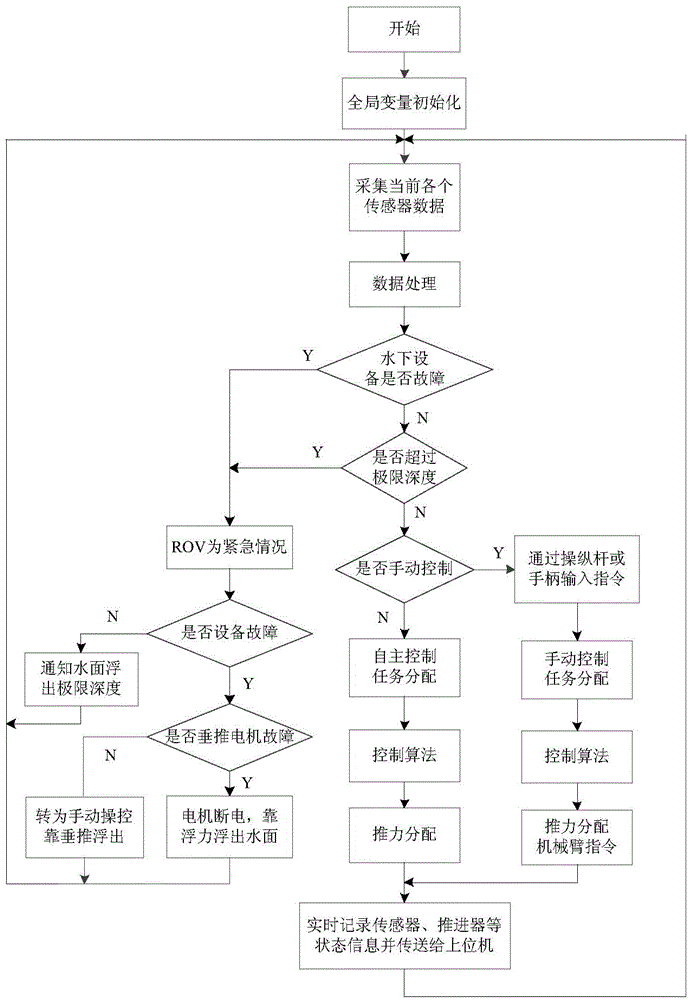
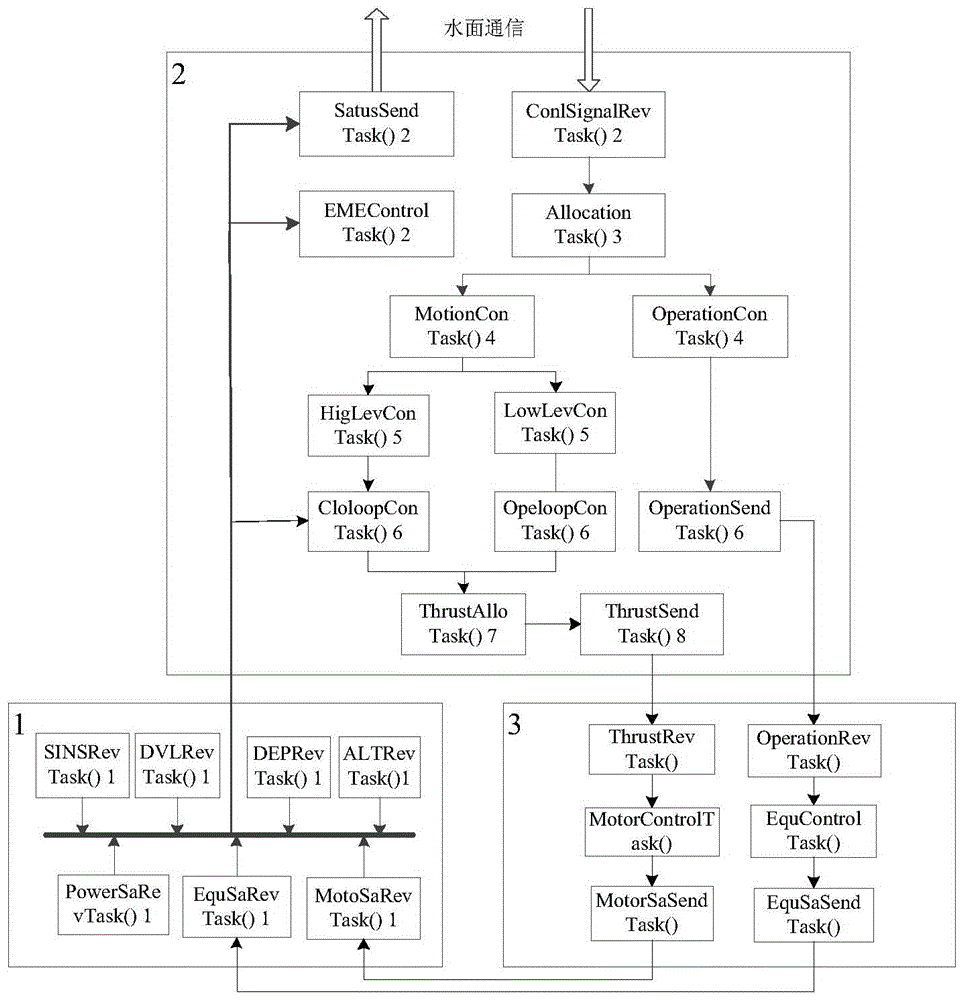
[0026] The invention provides a deep-sea operation type ROV control system software structure and control method. The structure is suitable for the ROV control system based on the VxWorks real-time embedded system. It is divided into four parts: monitoring layer, control layer, execution layer, and data management layer: monitoring The layer is used to monitor sensor data and ROV equipment status and complete data communication; the control layer and execution layer together complete ROV movement and underwater operation control; the data management layer is used to store ROV system global variables. The ROV control system software also includes: the control method based on the ROV task control process; the ROV detailed task process characterized by the operation of the task function (Task) in the VxWorks embedded software program; ROV motion control and stability control me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com