Electric system phasor calculating method suitable for frequency deviation
A power system and calculation method technology, which is applied in frequency measurement devices, measurement of electrical variables, and frequency-to-amplitude conversion. It can solve the problems of troublesome correction, sacrifice of measurement accuracy, and large amount of calculation, etc., and achieve small memory usage and fast calculation speed. , high precision effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0050] Assume that the sequence of single-phase sampled values after low-pass filtering is expressed as X(i)=1.34*cos(2*f*π*i*0.00025), i=0, 1, 2, 3, . . . . N is taken as 80, that is, 80 sampling points per cycle, and the sampling interval is T S =0.00025 seconds. Unless otherwise specified, the calculation variable is of double type, the unit of phase is angle, the unit of frequency is Hz, and decimal truncation is rounded off.
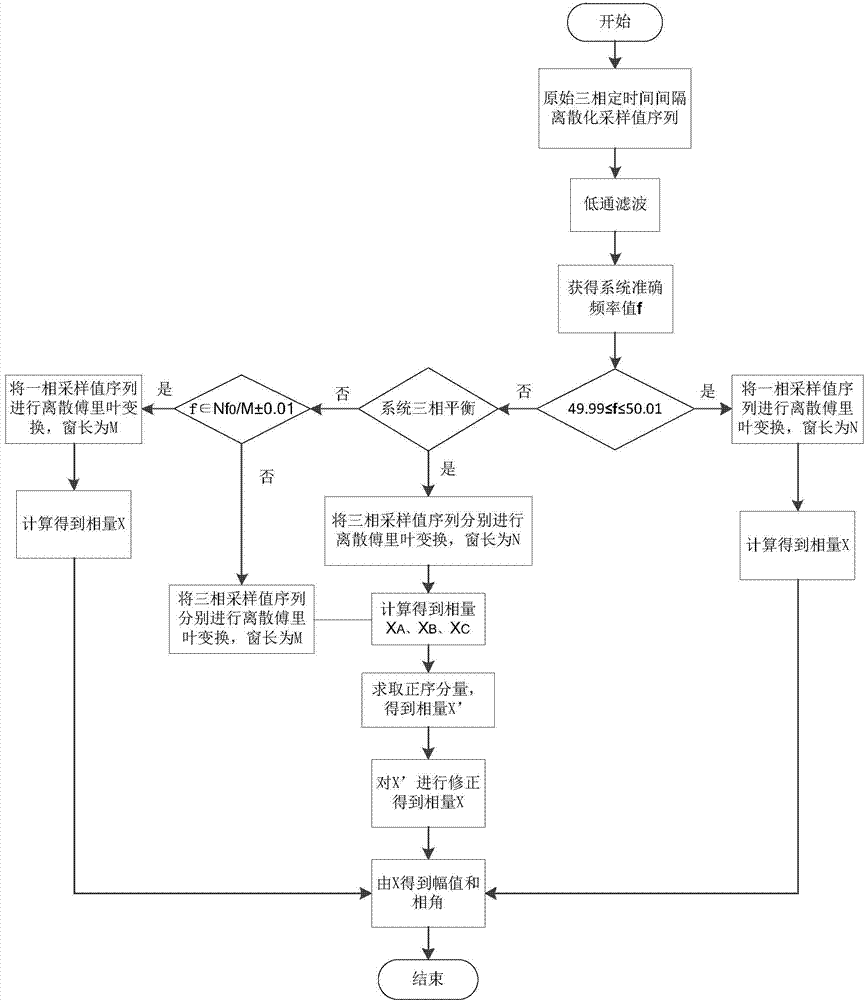
[0051] Assume that the current system is in a three-phase balanced state, the system frequency is 47Hz, and the current sampling time is (100×T S ), then when f=47Hz, the nearest integral frequency range to this frequency is: M=85, 47Hz is out of the whole point frequency range. According to the algorithm rules, choose step three.
[0052] X(i) A =1.34*cos(2*f*π*i*0.00025)
[0053] X ( i ) B = 1.34 * cos ...
Embodiment 2
[0059] Assume that the sequence of single-phase sampled values after low-pass filtering is expressed as X(i)=1.34*cos(2*f*π*i*0.00025), i=0, 1, 2, 3, . . . . N is taken as 80, that is, 80 sampling points per cycle, and the sampling interval is T S =0.00025 seconds. Unless otherwise specified, the calculation variable is of double type, the unit of phase is angle, the unit of frequency is Hz, and decimal truncation is rounded off.
[0060] Assuming that the current system is in a three-phase unbalanced state, there is a 5% negative sequence component, and the negative sequence leads the positive sequence by 30°. The system frequency is 47Hz, and the current sampling moment is (100×T S ).
[0061] Then when f=47Hz, the whole point frequency range closest to this frequency is: M=85, 47Hz is out of the whole point frequency range. According to the algorithm rules, choose step five.
[0062] X ( i ) ...
Embodiment 3
[0070] Assume that the sequence of single-phase sampled values after low-pass filtering is expressed as X(i)=1.34*cos(2*f*π*i*0.00025), i=0, 1, 2, 3, . . . . N is taken as 80, that is, 80 sampling points per cycle, and the sampling interval is T S =0.00025 seconds. Unless otherwise specified, the calculation variable is of double type, the unit of phase is angle, the unit of frequency is Hz, and decimal truncation is rounded off.
[0071] Suppose the current system frequency is 50.01Hz, and the sampling time is (100×T S ), then when f=50.01Hz, according to the algorithm rules, choose step 2. Select the sampling window length as the default power frequency sampling points per cycle N=80.
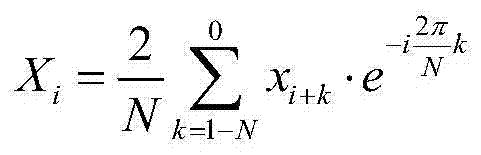
[0072] X 100 = 2 80 Σ k = - 79 0 x 100 + ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com