Robot SLAM object state detection method in dynamic sparse environment
A mobile robot, robot technology, applied in the direction of instruments, computer parts, image analysis, etc., can solve the problems of static objects with reduced positioning accuracy, unable to solve the SLAM problem of mobile robots, etc., to achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
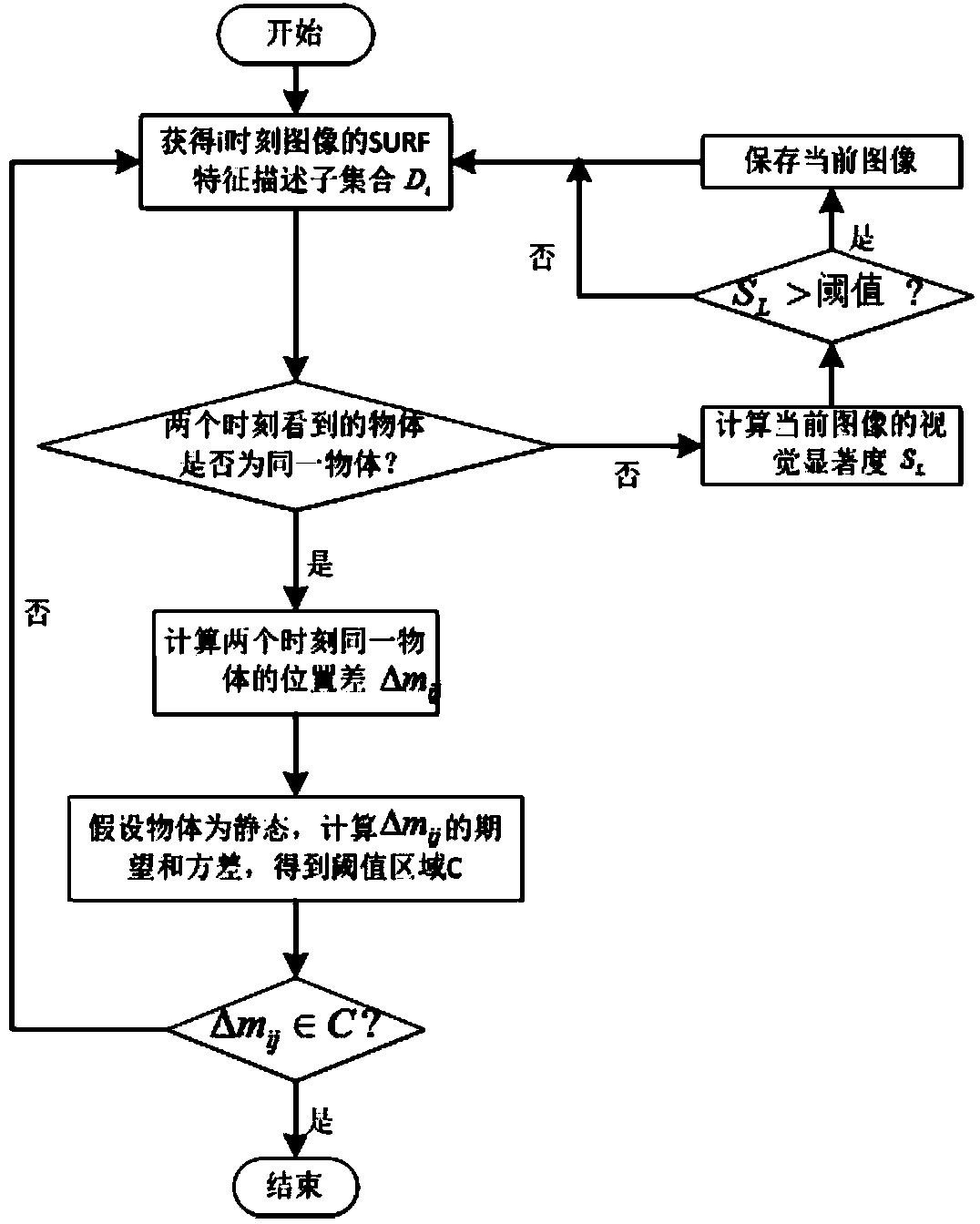
[0033] The process of the method involved in the present invention is as follows figure 1 As shown, including the following steps:
[0034] Step 1: Collect environmental images and obtain the feature vector set of the images.
[0035] Step 1.1, the mobile robot collects environmental images through binocular vision sensors.
[0036] Step 1.2: Use the multi-scale and multi-directional Gabor function to construct the energy image space, and use the non-maximum suppression method to screen the extreme points detected in the 8-point neighborhood.
[0037] (1) Design a set of multi-directional odd and even symmetric filters based on Gabor function:
[0038] g sin = 1 2 πσ 2 exp ( - x 2 + y 2 2 σ 2 ) sin ( σ π ( x cos θ + y sin θ ) )
[0039] g cos = 1 2 πσ 2 exp ( - x 2 + y 2 2 σ 2 ) cos ( σ π ( x cos θ + y sin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com