Embedded type control system based on upper limb exoskeleton assisting robots
An embedded control and exoskeleton technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of heavy workload, affecting the control effect of circuit execution efficiency, large size and power consumption, and achieve powerful task management, High stability performance task management, real-time response speed effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
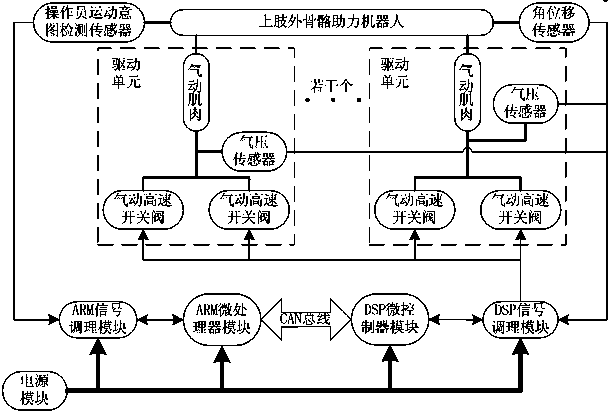
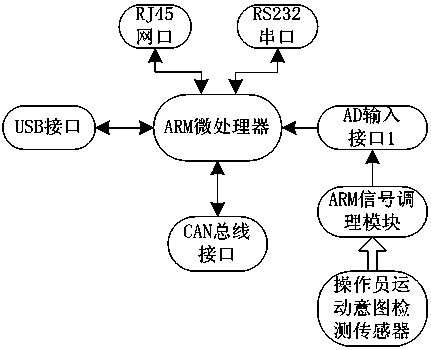
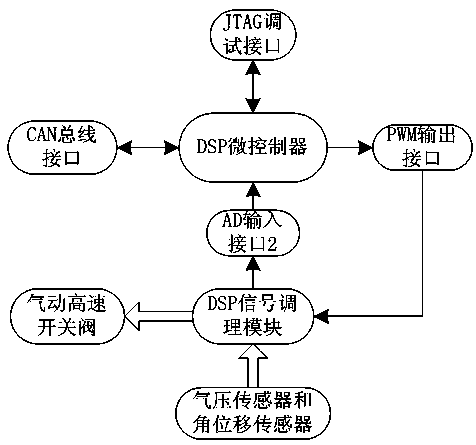
[0031] like figure 1 As shown, an embedded control platform for an exoskeleton power-assisted robot of the present invention is mainly composed of two single-arm parts and a back bracket with the same structure. Power-assisted robot; it is characterized in that: also comprises ARM microprocessor module, DSP microcontroller module, ARM signal conditioning module, DSP signal conditioning module, power supply module, two operators motion intention detection sensors, four angular displacement sensors and four A drive unit with the same structure; the ARM microprocessor module is connected to the DSP microcontroller module through the CAN bus, and the two operators' motion intention detection sensors on the upper extremity exoskeleton power-assisted robot are connected to the ARM microprocessor module through the ARM signal conditioning module , th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com