Force-sensing small robot system based on current intensity detection and teleoperation method thereof
A robot system, a technology of current intensity, applied in signal transmission system, measurement of force by measuring the change of magnetic properties of materials caused by applied stress, instruments, etc., can solve the problem that the operator cannot effectively select the road, the robot cannot move smoothly, and Perceive the robot terrain and other issues to reduce the burden on eyes, reduce energy, and avoid damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
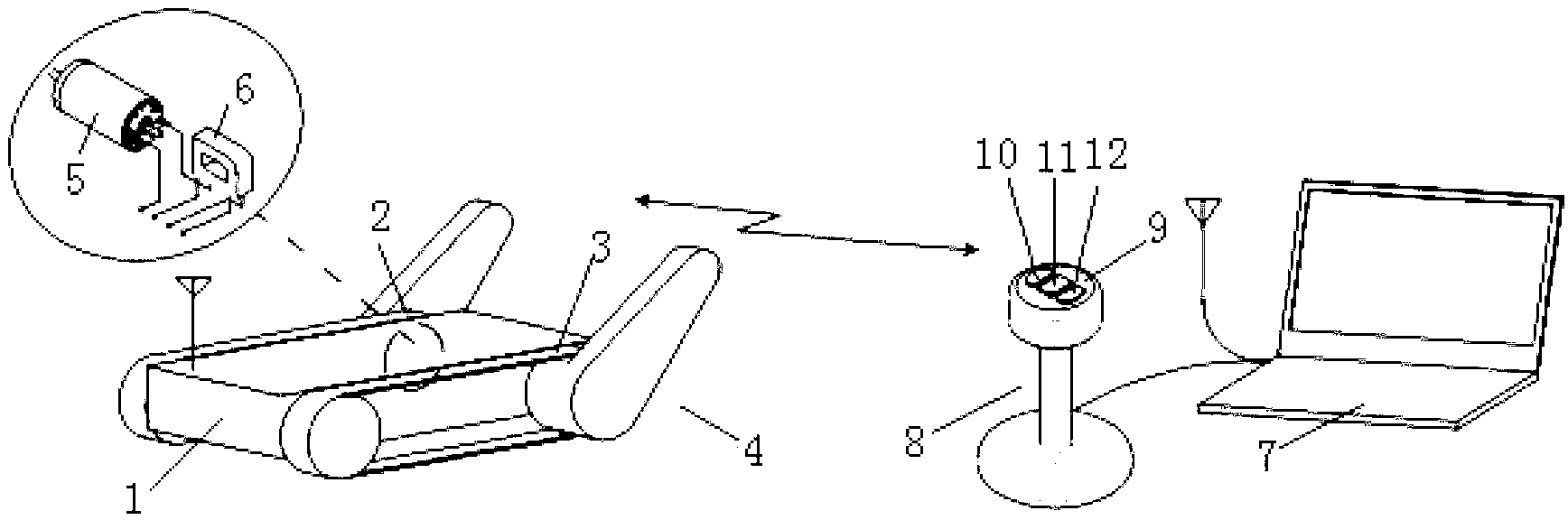
[0028] This embodiment provides a force-sensing small robot system based on current intensity detection, and its structural diagram is as follows figure 1 As shown, it includes a mobile robot body 1 , a force-sensing manipulator 8 and two Hall current sensors 6 .
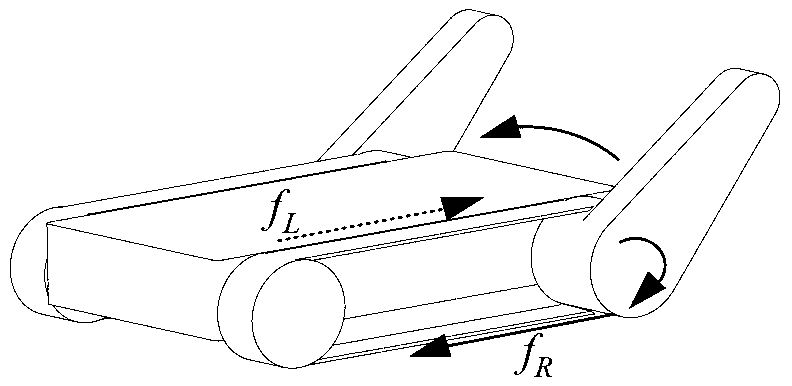
[0029] The mobile robot car body 1 includes a left driving wheel 2, a right driving wheel 3, a left follower wheel, a right follower wheel, two drive motors 5 and two guide arms 4, and the front and rear wheels on both sides are covered by two crawler belts respectively. The front wheels drive the rear wheels to rotate, and the driving wheels on both sides rotate in the same direction when traveling in a straight line, and the left and right driving wheels turn in opposite directions when turning. Two driving motors 5 are electrically connected with the left driving wheel 2 and the right driving wheel 3 respectively, and drive the left driving wheel 2 and the right driving wheel 3 to rotate. The two guide arms 4 ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com