Coordination control method of spatial rope-tying robot compounded body postures after target catching
A technology of space tethering and coordinated control, applied in attitude control, adaptive control, general control system, etc., can solve the problems of tether winding, unstable complex posture, difficult complex posture stability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
[0030] Embodiments of the present invention can be realized through the following technical solutions:
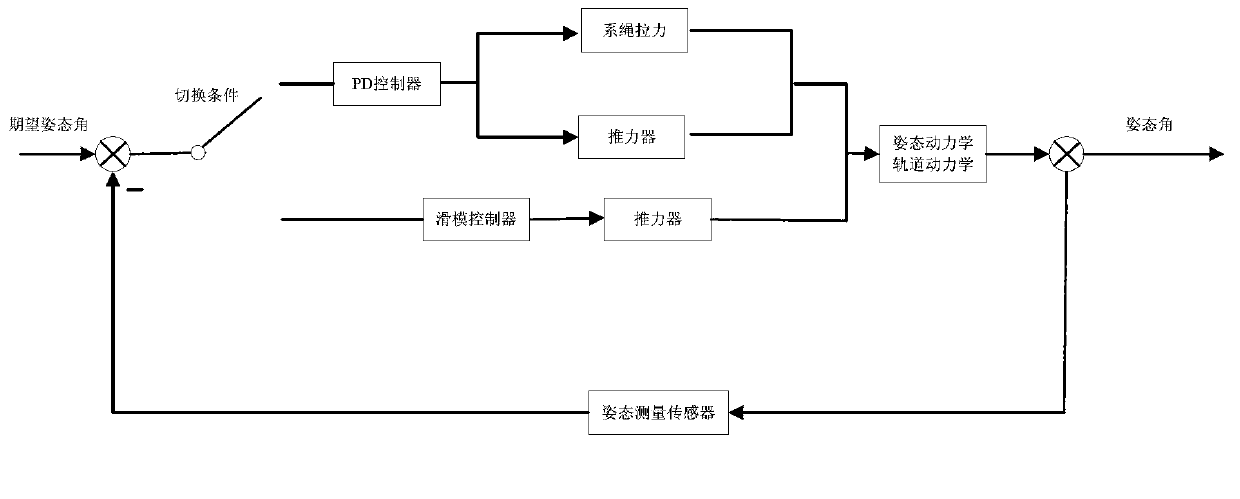
[0031] The complex control of the space tethered robot after the target capture is characterized by: the introduction of the tether pull force, the design of the coordinated attitude control method of the tether pull force and the thruster, and the coordination control method using the tether pull force and the thruster Methods; then considering the limitations of using tethers for attitude control, a coordinated control method for attitude control using only thrusters is designed, and finally a controller switching control method is designed for coordinated attitude control.
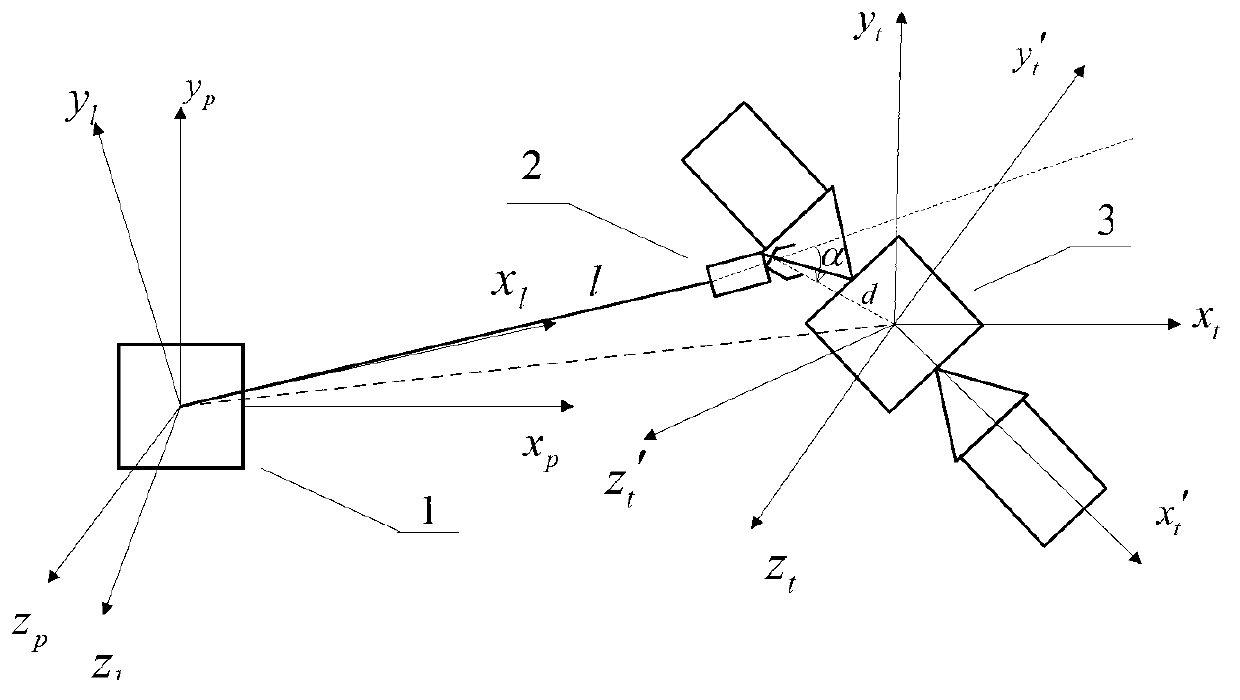
[0032] Such as figure 1 As shown, after the space tether robot captures the target solar panel, the space tether robot rotates with the target. In the figure, 1 is the space platform,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com