Airbag clamping device with function of feeding back intervention operation resistance
A clamping device and balloon technology, applied in medical science, catheter, surgery, etc., can solve the problems of catheter deformation, inability to accurately obtain push-pull and torsion operations, and difficulty in meeting the clamping requirements of catheters with various diameters. The effect of reducing slippage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
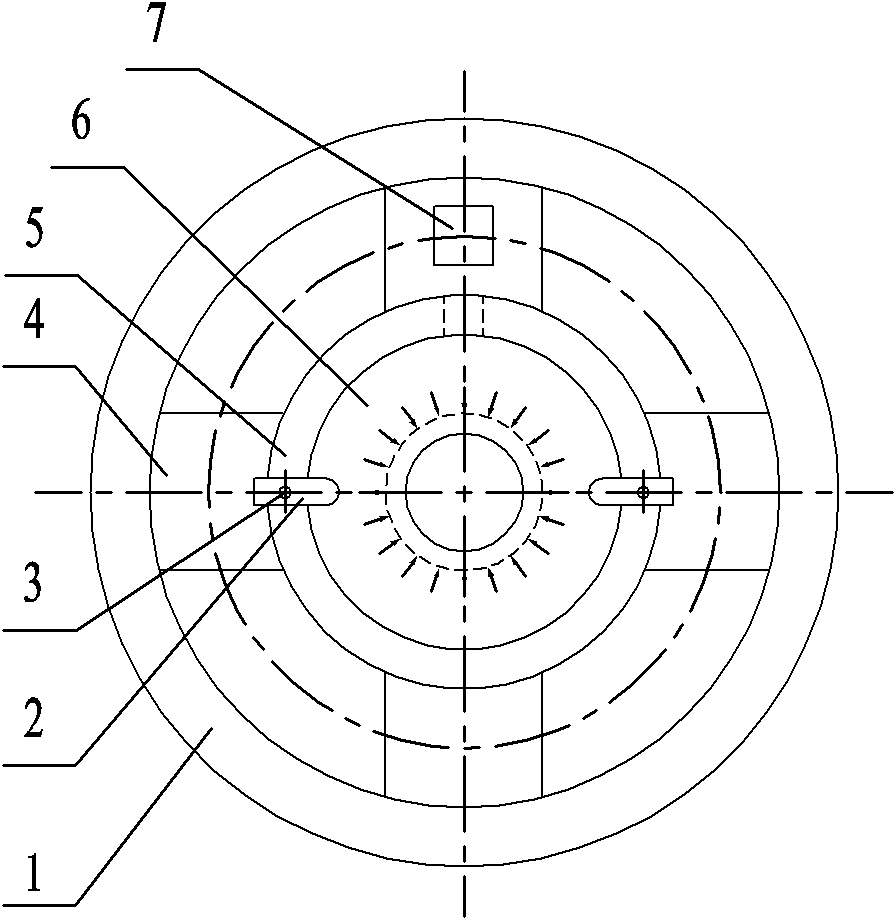
[0017] Embodiment 1: as figure 1 and figure 2 Shown, the present invention comprises air bag 6, air bag sleeve pipe 5, air pump 20, pressure measuring cavity 22, trachea 23 and air pressure sensor 21, and described air bag 6 is connected with air bag sleeve pipe 5 and has no relative movement, in air bag sleeve pipe 5 Both sides of one end are respectively provided with baffles 2, and the air pump 20 is sequentially connected with the pressure measuring chamber 22, the air pipe 23 and the air bag 6, and the air pressure sensor 21 is arranged in the pressure measuring chamber 22, and the output signal line 25 of the air pressure sensor 21 is connected with the external pneumatic control The board connection is monitored by the air pressure sensor 21 to change the pressure in the air bag 6 to adapt to catheters 24 of different diameters. In this example, the baffle plate 2 is connected by a pin 3 so that the baffle plate 2 can rotate around the pin 3 . The airbag 6 is an airb...
Embodiment 2
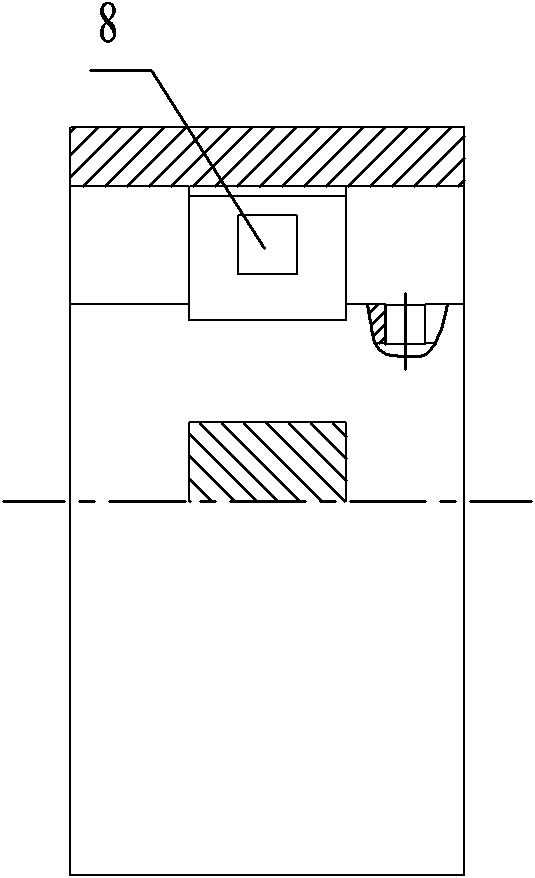
[0020] Embodiment 2: as figure 1 , figure 2 In this example, a force feedback device is added on the basis of Embodiment 1, and the force feedback device includes at least one elastic web 4, first and second strain gauges 7, 8 and an outer casing 1, and the outer casing 1 is arranged on the airbag Outside the casing 5, elastic webs 4 are arranged between the airbag casing 5 and the outer casing 1, and first and second strain gauges 7 and 8 are respectively arranged in the axial and radial directions on one of the elastic webs 4 .
[0021] There are four elastic webs 4 described in this example, and the push-pull force feedback in this example is composed of the first strain gauge 8, the airbag sleeve 5, the outer sleeve 1 and four elastic webs evenly arranged along the circumference of the airbag sleeve 5 4 Cooperate to realize. On the premise that the balloon 6 clamps the catheter 24 , an axial force is applied to the overtube 1 . This force is transmitted to the airbag ...
Embodiment 3
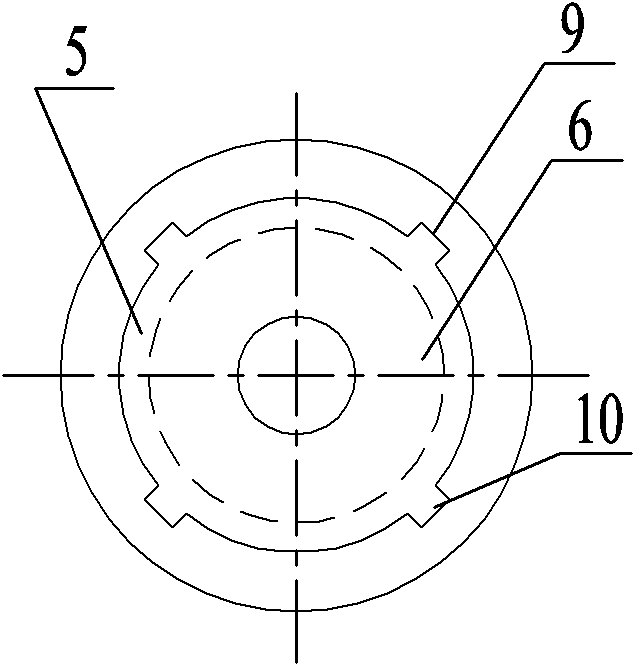
[0024] Embodiment 3: The overall structure of this embodiment is the same as that of Embodiment 2, the difference is that in this embodiment, there are three protrusions 10 on the outer periphery of the airbag 6, and there are also three grooves 9 matching it. There is one elastic spoke plate 4 .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com