Non-adaptive repeat power control method and device for long term evolution (LTE) terminal
A non-adaptive retransmission and power control technology, applied in the field of communications, can solve the problems of wasting wireless resources, reducing throughput, increasing transmission delay, etc., to improve the probability of successful retransmission, improve system throughput, and improve The effect of SINR
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example 1
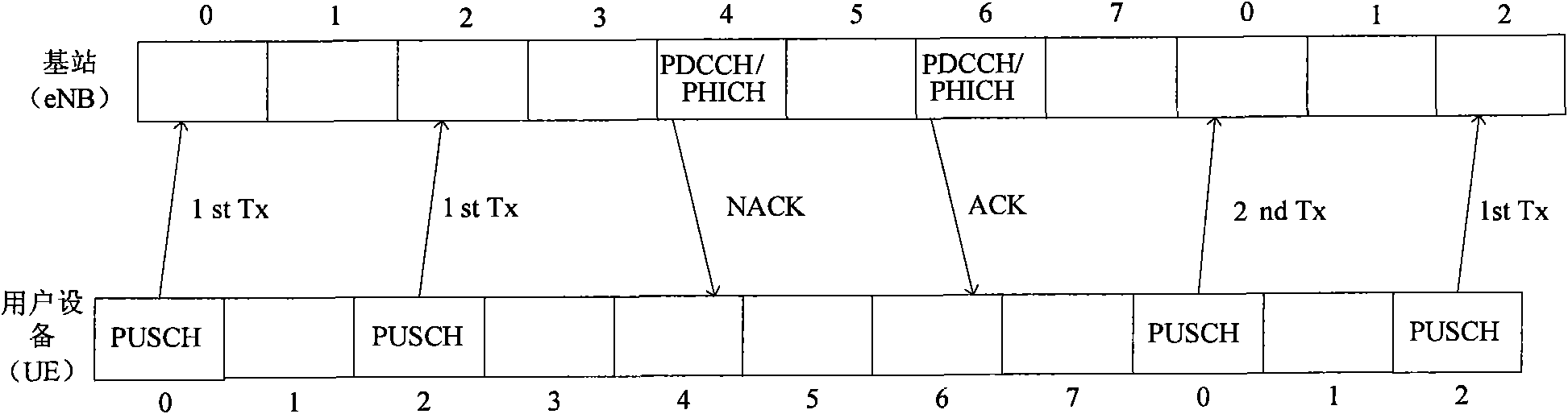
[0059] refer to figure 2 As shown, taking the FDD system as an example, there are 8 uplink HARQ processes, which are numbered from 0 to 7 in turn, and 1 is added to each TTI (Transmission Time Interval, transmission time interval) process number. It is assumed that the terminal uses an absolute value power control mode.
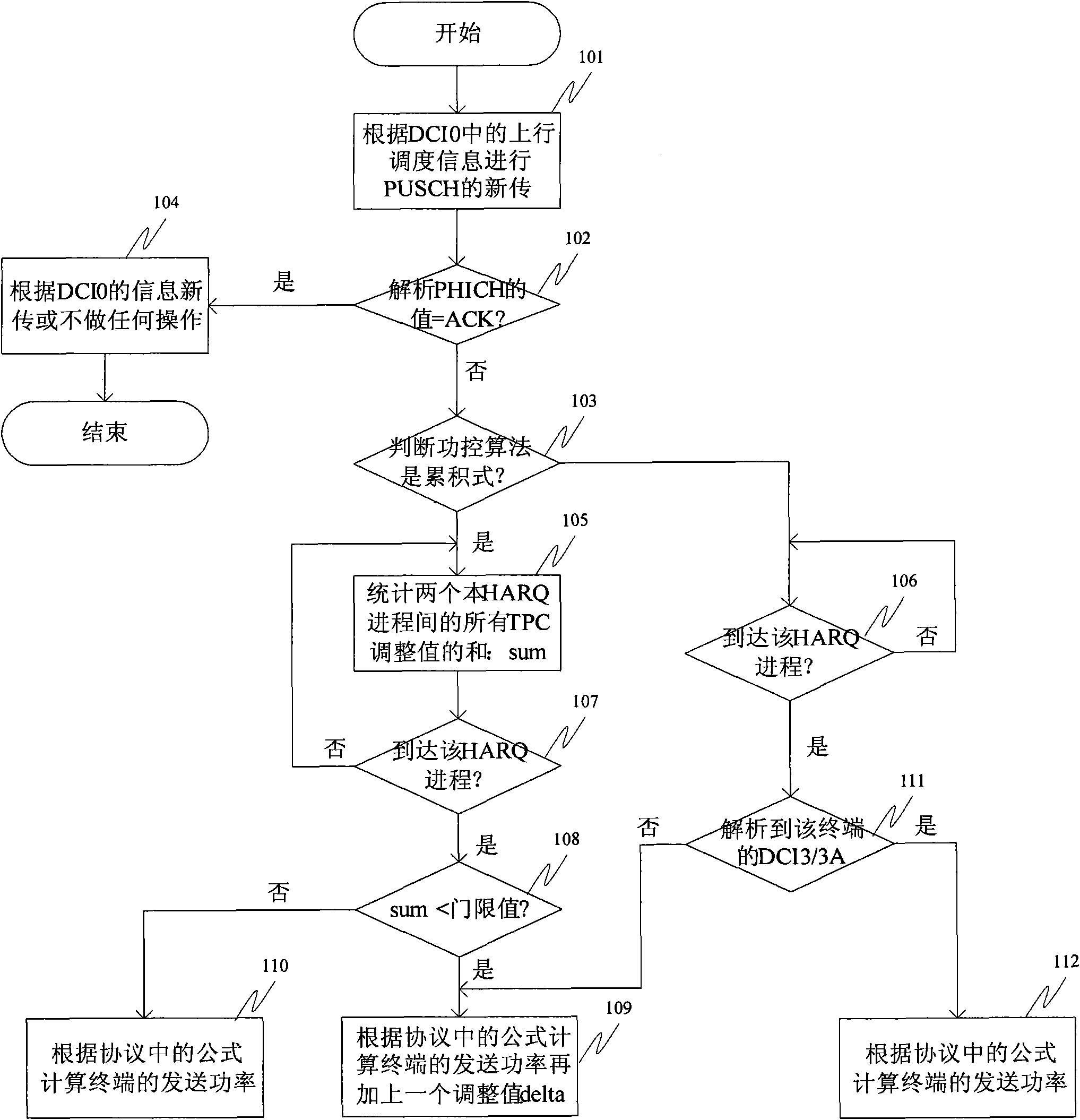
[0060] Assuming that the UE sends a packet of newly transmitted PUSCH data in the process of HARQ ID=0, after 4 subframes, it parses NACK through PHICH, indicating that the transmission of the newly transmitted data fails. Since DCI0 in the PDCCH is not detected in this subframe, the UE A non-adaptive HARQ retransmission will be performed. That is, retransmission is performed according to the newly configured modulation and coding method and radio resources. If the TPC value that matches itself is not found in the DCI3 / 3A of the PDCCH, in the existing technology, the terminal does not have TPC adjustment when retransmitting value, may be sent with less pow...
example 2
[0069] Taking the FDD system as an example, it is assumed that the terminal adopts a cumulative power control method. That is, the current transmission is affected by the power value sent before, and the terminal needs to make a fine-tuning value according to the TPC instruction on the basis of the previous power.
[0070] Assuming that a new transmission is sent in subframe i, if the new transmission fails, its retransmission occurs in i+8 subframe. According to the agreement, the cumulative power adjustment value f(i)=f(i-1)+δ PUSCH (i-K PUSCH ), K PUSCH is a parameter. For the FDD system, the value is fixed at 4. where δ PUSCH (i) represents the adjustment value of the TPC in DCI0 / 3 / 3A corresponding to the i-th subframe, which can be obtained by looking up Table 1 or Table 2. Wherein, Table 1 is the power adjustment value corresponding to TPC in DCI0 / 3 in the prior art, and Table 2 is the power adjustment value corresponding to TPC in DCI3A in the prior art.
[0071] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com