Self-adaptive control method for diagonal gait of four-footed robot
A quadruped robot, adaptive control technology, applied in the direction of control without feedback, can solve the problem of not considering quadruped robot and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] This embodiment is an adaptive control method for a quadruped robot with a diagonal gait as a walking mode in an unstructured environment. This embodiment is based on the fuzzy inference learning algorithm and the real-time correction algorithm of the foot trajectory, and uses the diagonal gait as the movement mode to comprehensively control the quadruped robot body to adapt to various complex terrains.
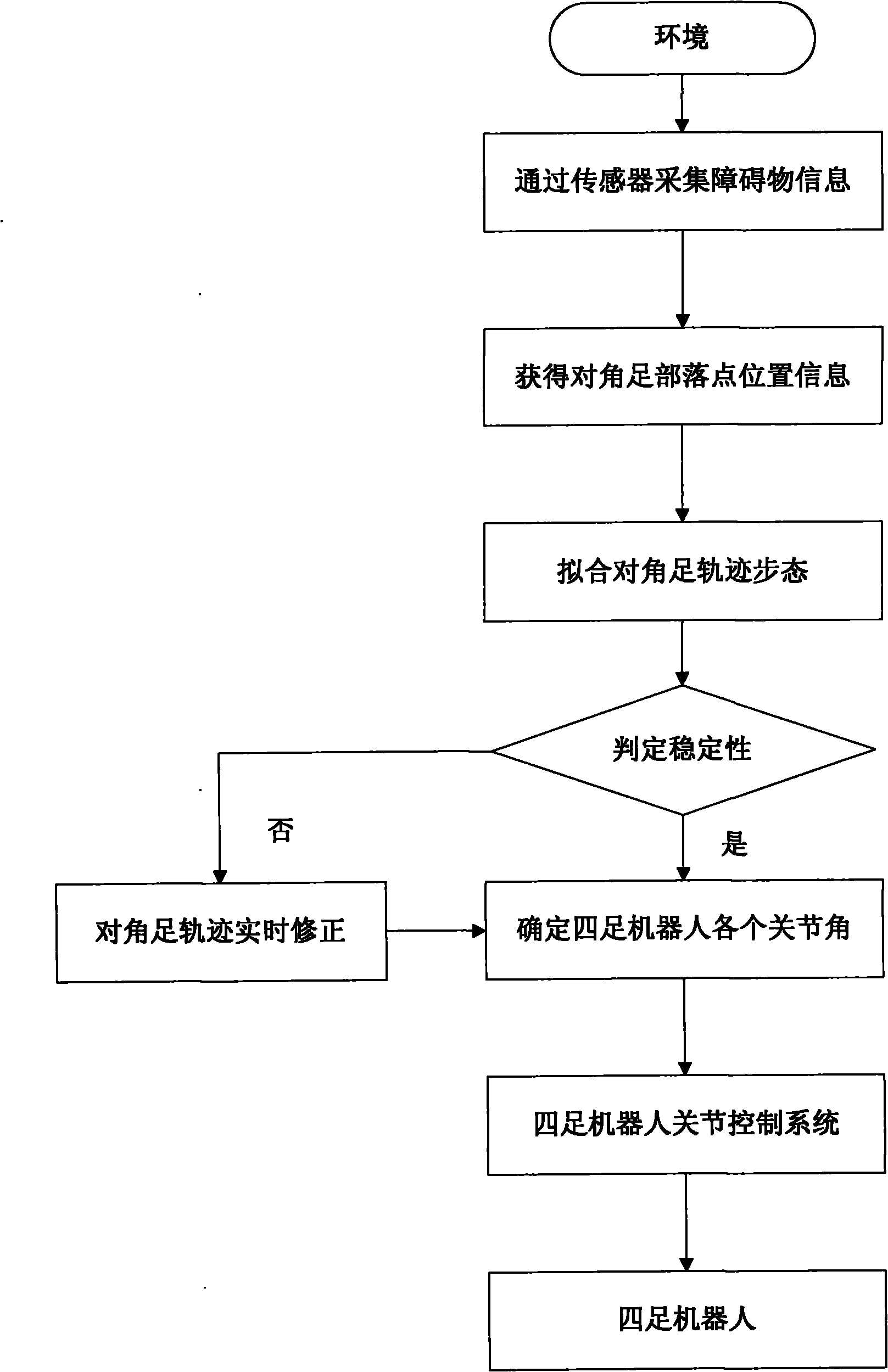
[0042] Such as figure 1 shown. First, obtain useful information from the environment in real time by combining sensors, including the distance information from the forefoot of the quadruped robot to the front of the obstacle and the height information of the obstacle, and then obtain the position information of the diagonal foot landing point according to the foot trajectory fuzzy inference learning algorithm, and then fit the Diagonal foot trajectory gait. However, the quadruped robot has poor stability when adapting to variable gait walking in an unstructured envi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com