Method for recognizing human walking gait cycle with electromyographic signal
A technology of electromyographic signals and human body recognition, applied in applications, medical science, sensors, etc., can solve problems such as zero drift, high equipment prices, and large calculations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0079] The first step, the equipment used and its installation
[0080] according to Figure 10 As shown, stick the disposable three-point differential input ECG electrode with non-drying conductive gel on the muscle surface of the human leg, and follow the straight line where the positive input electrode 1 and the negative input electrode 2 are located along the human leg. The direction of the muscle fiber is placed on the muscle belly, and the reference ground electrode 3 is pasted at the same distance from the positive input electrode and the negative input electrode. Any two of the positive input electrode 1, the negative input electrode 2 and the reference ground electrode 3 The distances between the electrodes are all equal; the MyoScan-Pro EMG sensor of Thought Technology Company is placed on the above-mentioned ECG electrode, and the three electrodes of the above-mentioned ECG electrode are connected with the MyoScan-Pro EMG sensor through a conductive buckle. Connect...
Embodiment 2
[0097] Except the calculation method of the signal peak-valley linear interpolation piecewise integration algorithm (PVLI&PI) for calculation, other steps and methods are the same as in Embodiment 1.
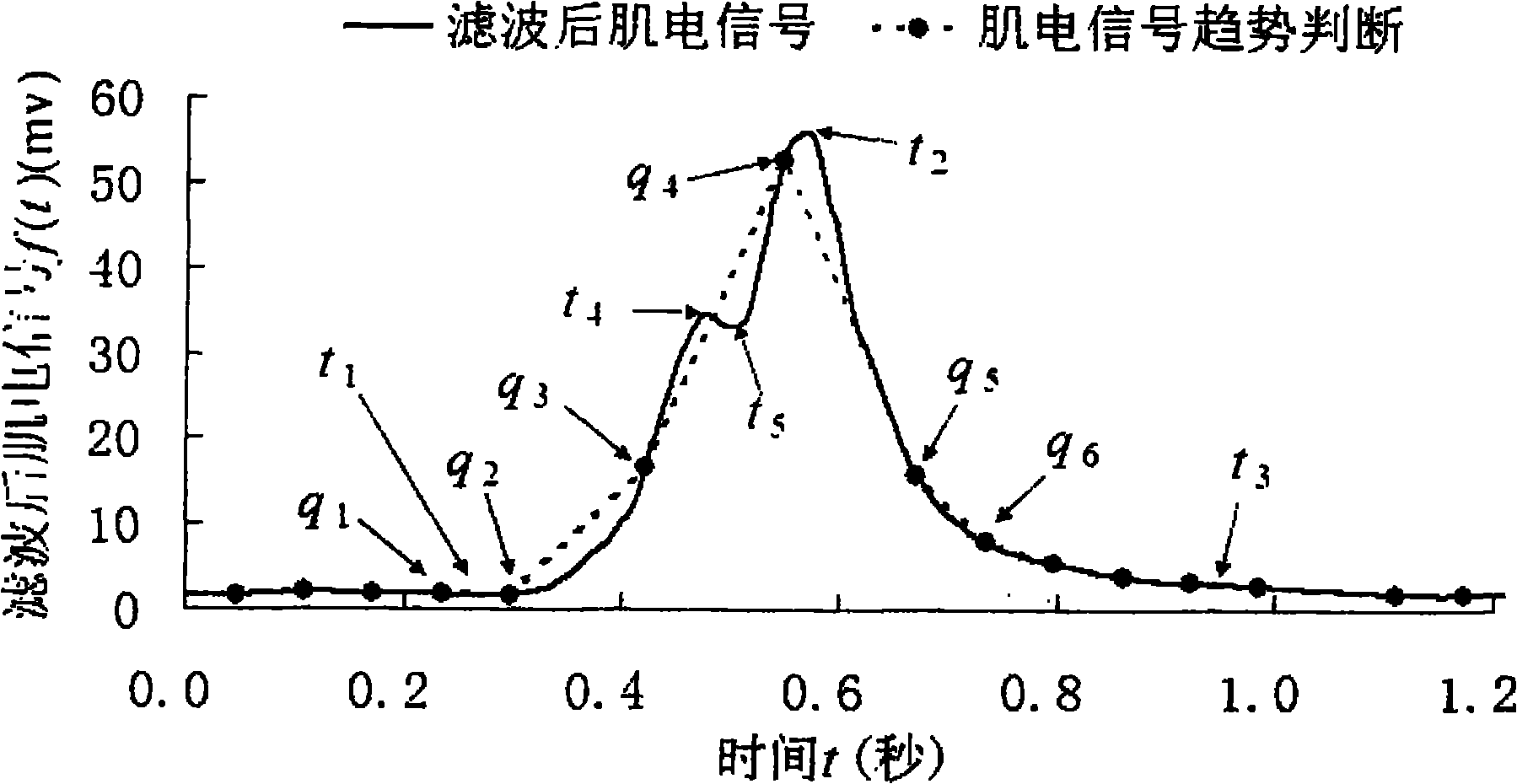
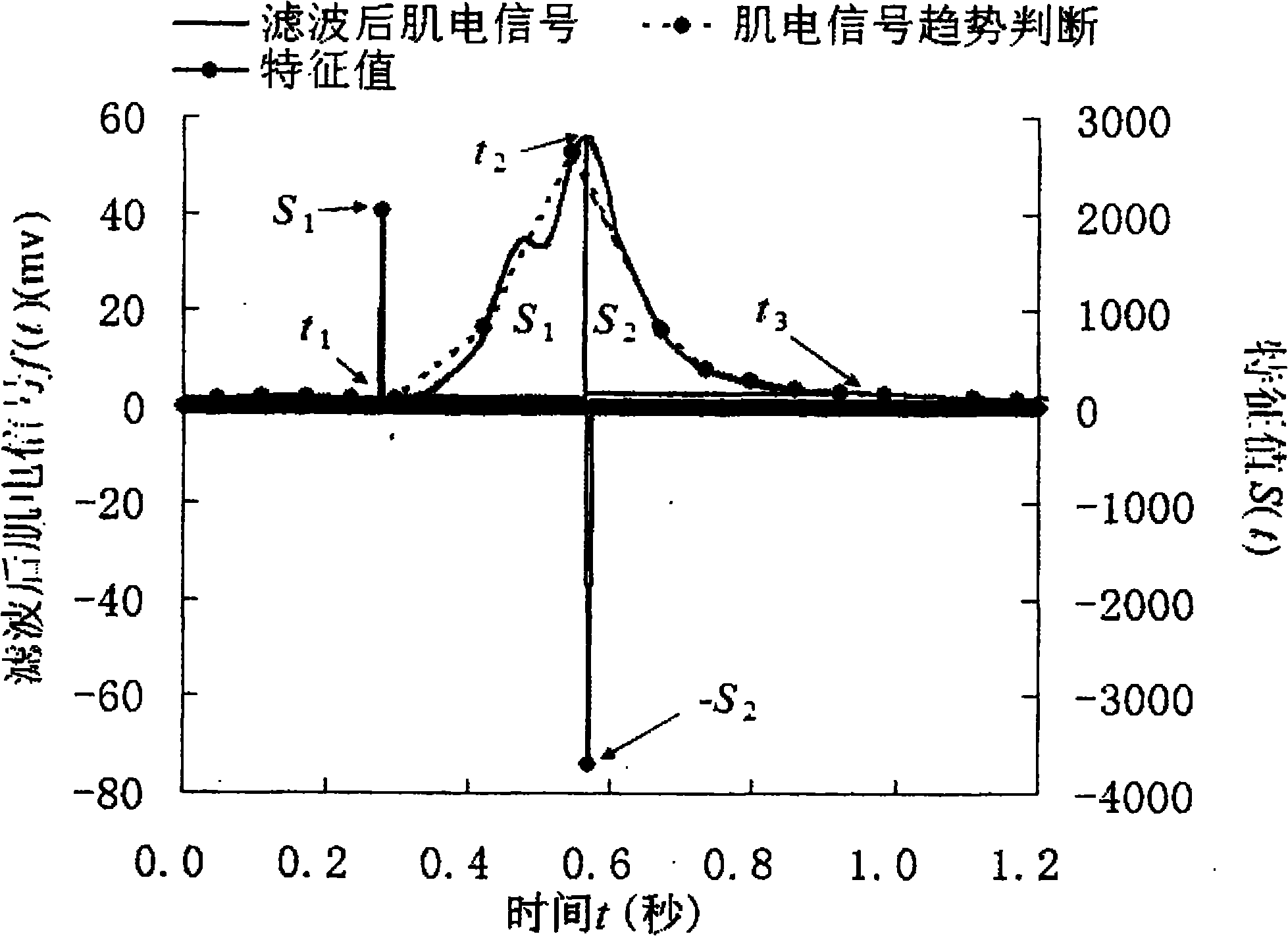
[0098] Using the peak-valley linear interpolation piecewise integration algorithm, the obtained valley t 1 The eigenvalues are represented by trough t 1 Amplitude is referenced at trough t 1 with crest t 2 Linear interpolation between, trough t 1 to crest t 2 The integral value S of the amplitude after interpolation3 , the resulting peak t 2 The eigenvalues are represented by trough t 3 Amplitude is referenced at peak t 2 with trough t 3 Linear interpolation between, peak t 2 to trough t 3 The integral value S of the amplitude after interpolation 4 , is a negative value, the specific process is:
[0099] The positive phase eigenvalue S including the trough location 3 , that is, record the negative phase eigenvalue S of the rising change of the signal and the peak...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com