Random sampling consistency-based characteristic line detection method for three-dimensional point cloud
A random sampling and three-dimensional point cloud technology, which is applied to computer parts, instruments, character and pattern recognition, etc., can solve the problems of low time overhead and achieve the effect of eliminating the influence of noise, improving time efficiency and reducing noise
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0068] figure 1 Shown is the general flow chart of the present invention. The main process is:
[0069] Step 1, plane detection based on random sampling consistency.
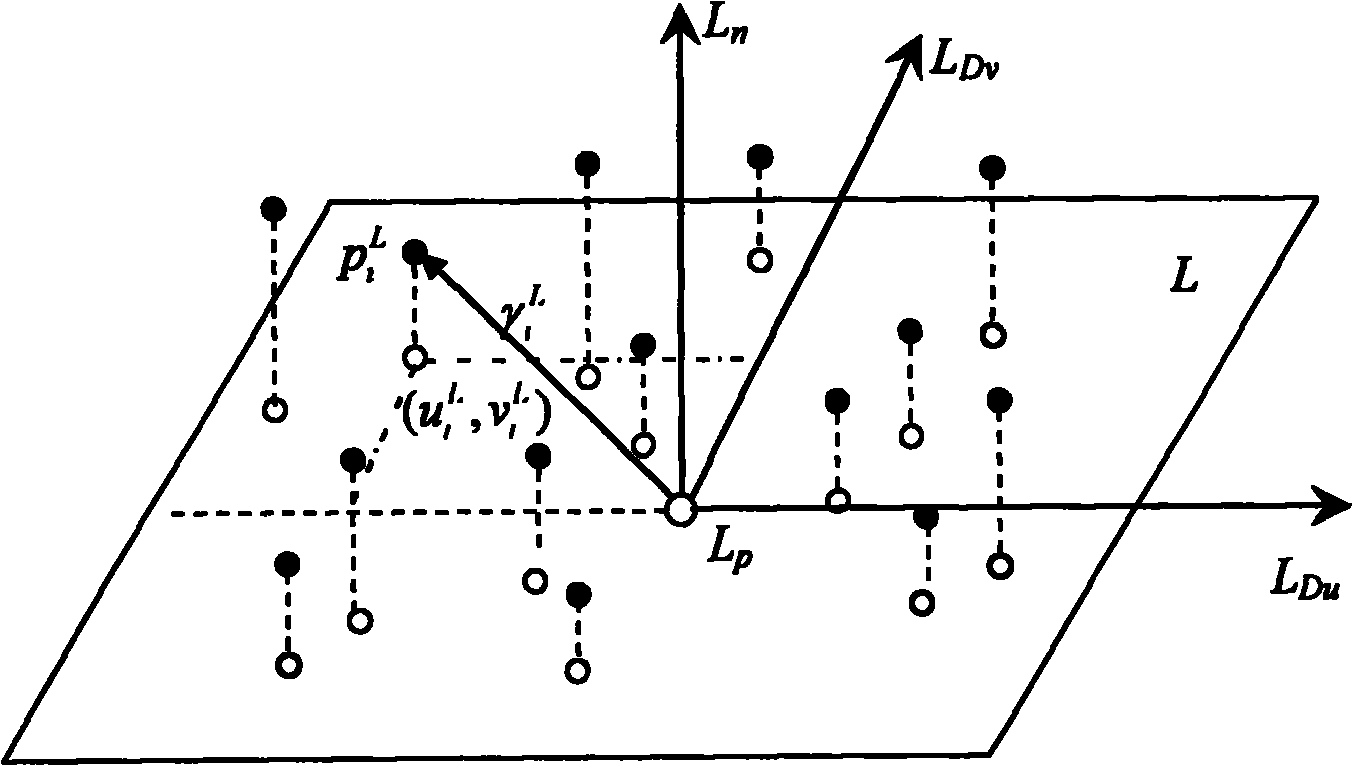
[0070] Step 2, feature line candidate point extraction, project the points that can be fitted by the detected plane onto the plane, construct a bitmap and select boundary points as candidate points.
[0071] Step 3: Apply random sampling consistency to the candidate points to detect the straight line where the feature line is located.
[0072] Step 4, based on the line segment parameter calculation of Principal Component Analysis, divide the points that can be fitted by each straight line into multiple interconnected areas, and calculate the starting point and end point of the line segment for each area.
[0073] figure 2 It is a flow chart of plane detection based on RANSAC. The main process is:
[0074] Step 1, randomly select in the point cloud P three dots;
[0075] Step 2, according to The posit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com