Modal modeling method of kinematic system with spatial six degrees of freedom
A motion system and modeling method technology, applied in special data processing applications, instruments, electrical digital data processing, etc., can solve problems such as inability to optimize design and high performance, structural modal leakage, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0044] Embodiment 1: a modal modeling method for a spatial six-degree-of-freedom motion system of the present invention, the steps are as follows: first, the complex spatial six-degree-of-freedom parallel motion system is discretized into several sub-structures, and the substructure Riccati transfer matrix method is used to calculate the former. Several order modes, obtain the low-order modal characteristics of the substructure, and construct its modal matrix, and then use the modal coordinate transformation to convert the physical coordinates into modal coordinates, establish the second-order differential equation of the modal motion of each substructure, and then use the modal coordinate transformation. Using the force balance conditions and coordination conditions between substructures to remove redundant degrees of freedom, the modal synthesis of each substructure is carried out to establish the overall modal motion equation of the spatial six-degree-of-freedom parallel moti...
Embodiment 2
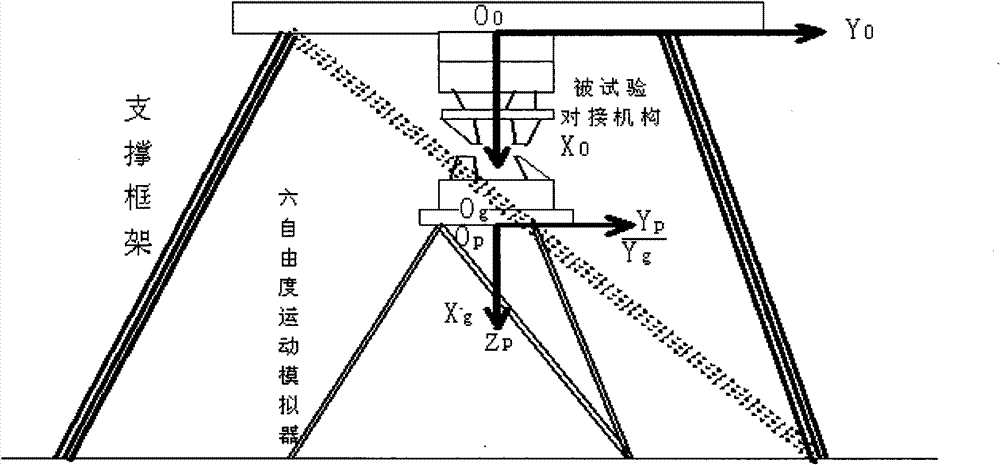
[0080] Example 2: Combination figure 1 , figure 1 It is the composition diagram of the super-large parallel motion system of space docking, in the figure: (1): docking platform of docking mechanism motion system, (2): driving outrigger.
[0081] The super-large motion system of the space docking mechanism is discretely divided into a motion platform with a load and 6 extra-long outriggers. During modal modeling, the physical body coordinates of the motion system of the space docking mechanism are established at the comprehensive center of mass of the platform and the load, and the system coincides with the inertial system (geodetic coordinate system) at the initial position. According to the geometric principle, it can be calculated that the upper hinge point of the kinematic system is in the coordinate matrix A under the system, and the lower hinge point is in the coordinate matrix B under the inertial system. The length of the outrigger in the mid-position of the motion sys...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com