Method for simultaneously realizing attitude maneuver and suppressing vibration of spacecraft with flexible accessory
A technology for attitude maneuvering and vibration suppression, applied in attitude control and other directions, can solve problems such as inability to suppress vibration and waste of jet resources, and achieve the effects of easy on-orbit real-time calculation, fuel saving, and high engineering feasibility.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
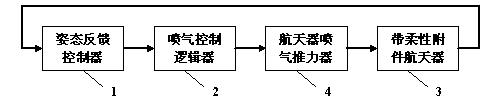
[0016] Specific implementation mode one, to combine figure 1 and Image 6 Describe this embodiment, a method of attitude maneuvering while suppressing vibration of a spacecraft with flexible appendages, which is realized based on the maneuvering control system of a spacecraft with flexible appendages, and the maneuvering control system of a spacecraft with flexible appendages includes an attitude feedback controller 1. Jet control logic 2, spacecraft with flexible attachment 3 and spacecraft jet thruster 4, the attitude signal output end of the spacecraft 3 with flexible attachment is connected with the attitude signal input end of attitude feedback controller 1, and the attitude feedback controller The control torque signal output terminal of 1 is connected with the control torque signal input terminal of the jet control logic 2, and the jet switch command signal output terminal of the jet control logic 2 is connected with the jet switch command signal input terminal of the...
specific Embodiment approach 2
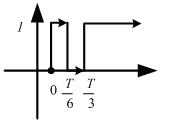
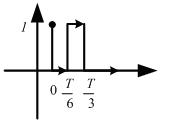
[0026] Specific implementation mode two, to combine Figure 2 to Figure 5 This embodiment is described. This embodiment is a further description of Embodiment 1. The four jet switch sequences described in Step 2 are positive opening sequence, positive closing sequence, negative opening sequence, and negative closing sequence.
[0027] Figure 2 to Figure 5 middle T is the first-order modal vibration period of the spacecraft with flexible attachment 3 in step 1. like Figure 2 to Figure 5 As shown, the schematic diagrams of the four switch command sequences of the present invention are respectively "positive opening sequence", "positive closing sequence", "negative opening sequence", and "negative closing sequence", which sequentially realize the positive opening and positive closing of the jet , Reverse open, reverse close command output, change a single switch command into multiple outputs, after such processing can avoid the vibration of the flexible attachment when the...
specific Embodiment approach 3
[0028] Specific implementation mode three, This implementation mode is a further description of the specific implementation mode 1. The minimum action time of the switch sequence in step 3 t min = T / 3 +T h ,in T h is the response time of the jet thruster hardware, T is the first-order modal vibration period of spacecraft 3 with flexible attachments.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com