


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Automatic control device of oil pipe clamping mechanism of non-well killing workover rig
A technology of automatic control device and clamping mechanism, which is applied to the automatic control system of drilling, wellbore/well components, oil traps, etc., which can solve the problems of no system safety guarantee, difficult pipeline layout, poor maintainability, etc., and achieve improved Safety, simple layout of network cables, and convenient maintenance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention is illustrated below by an example.
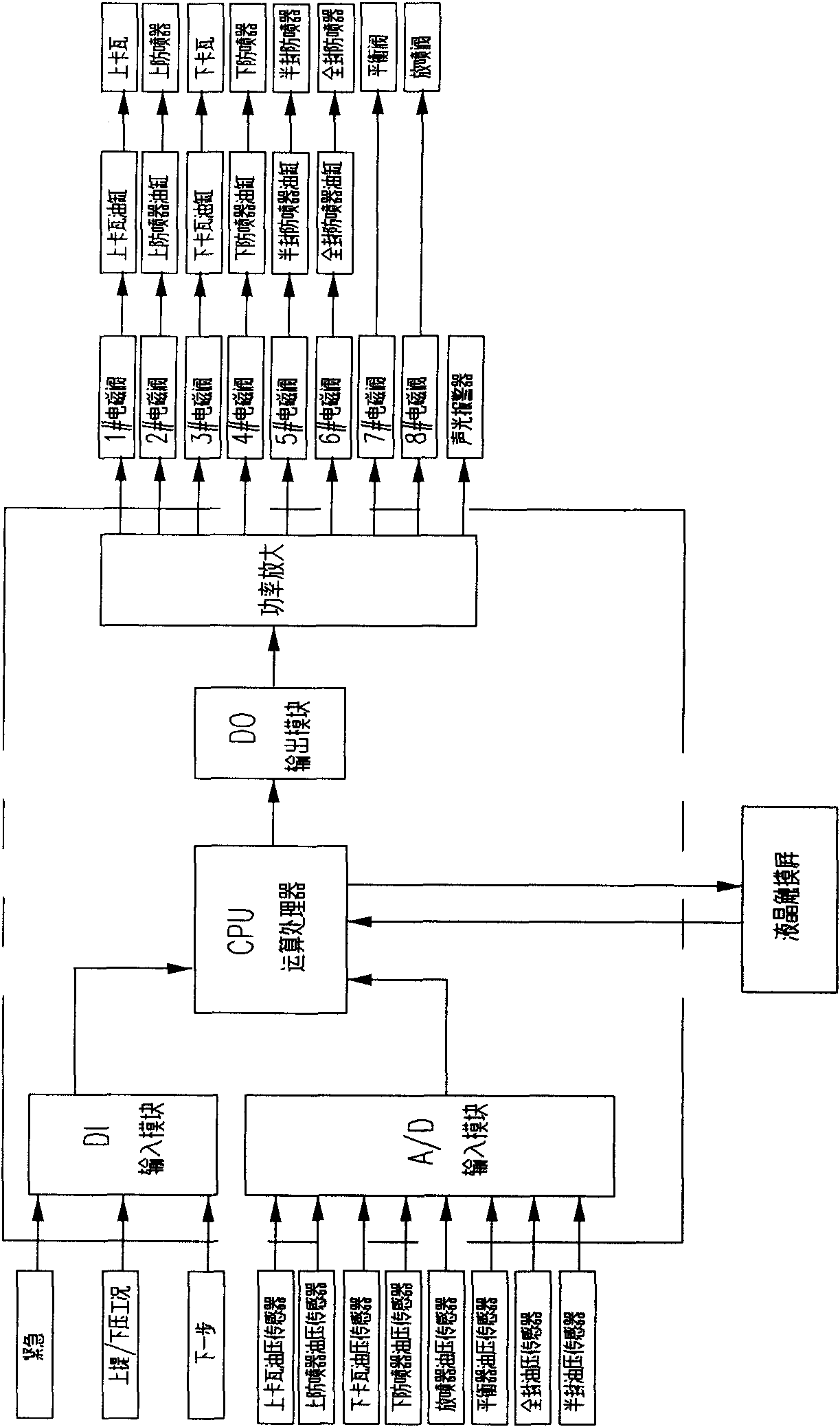
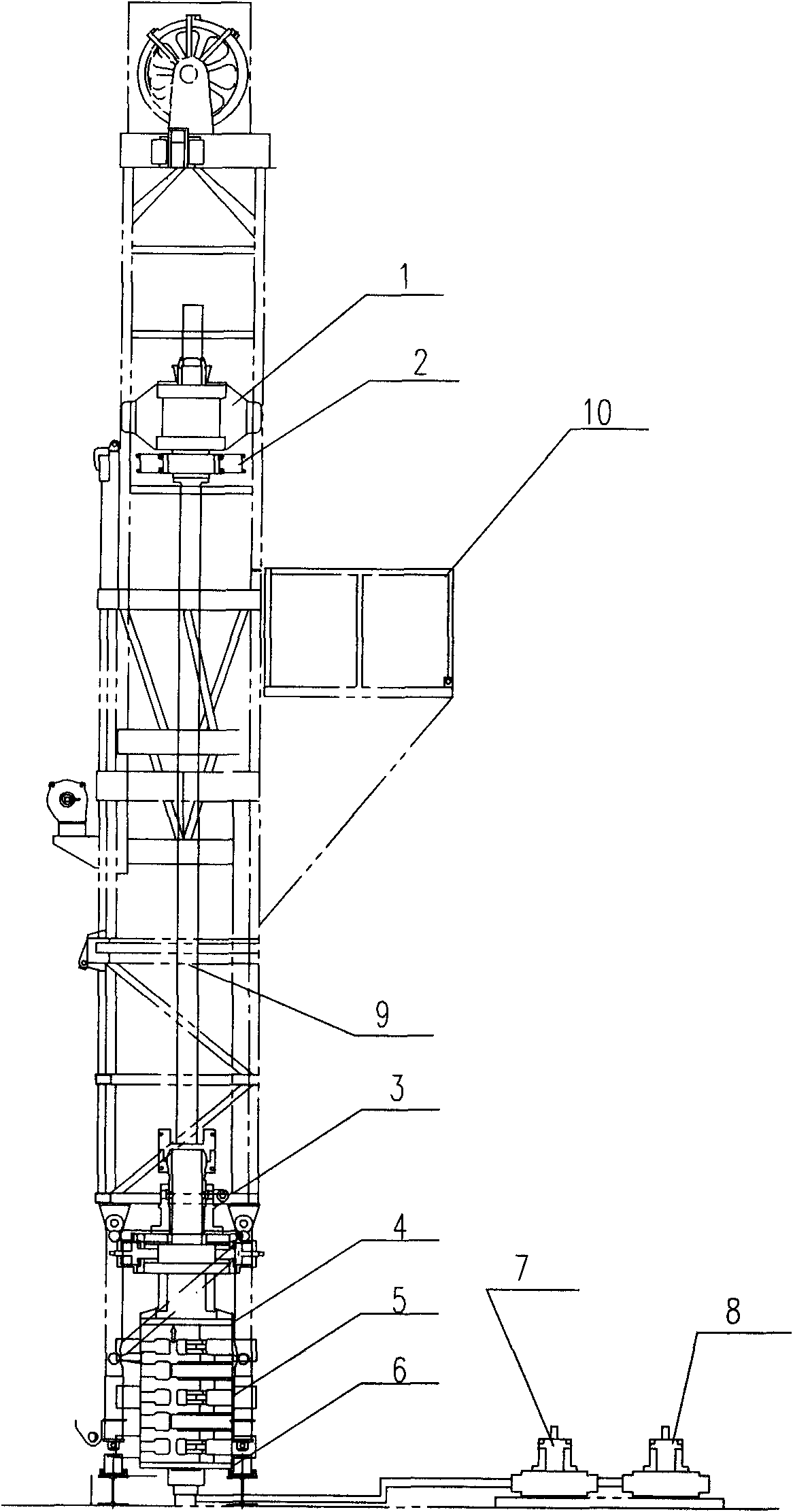
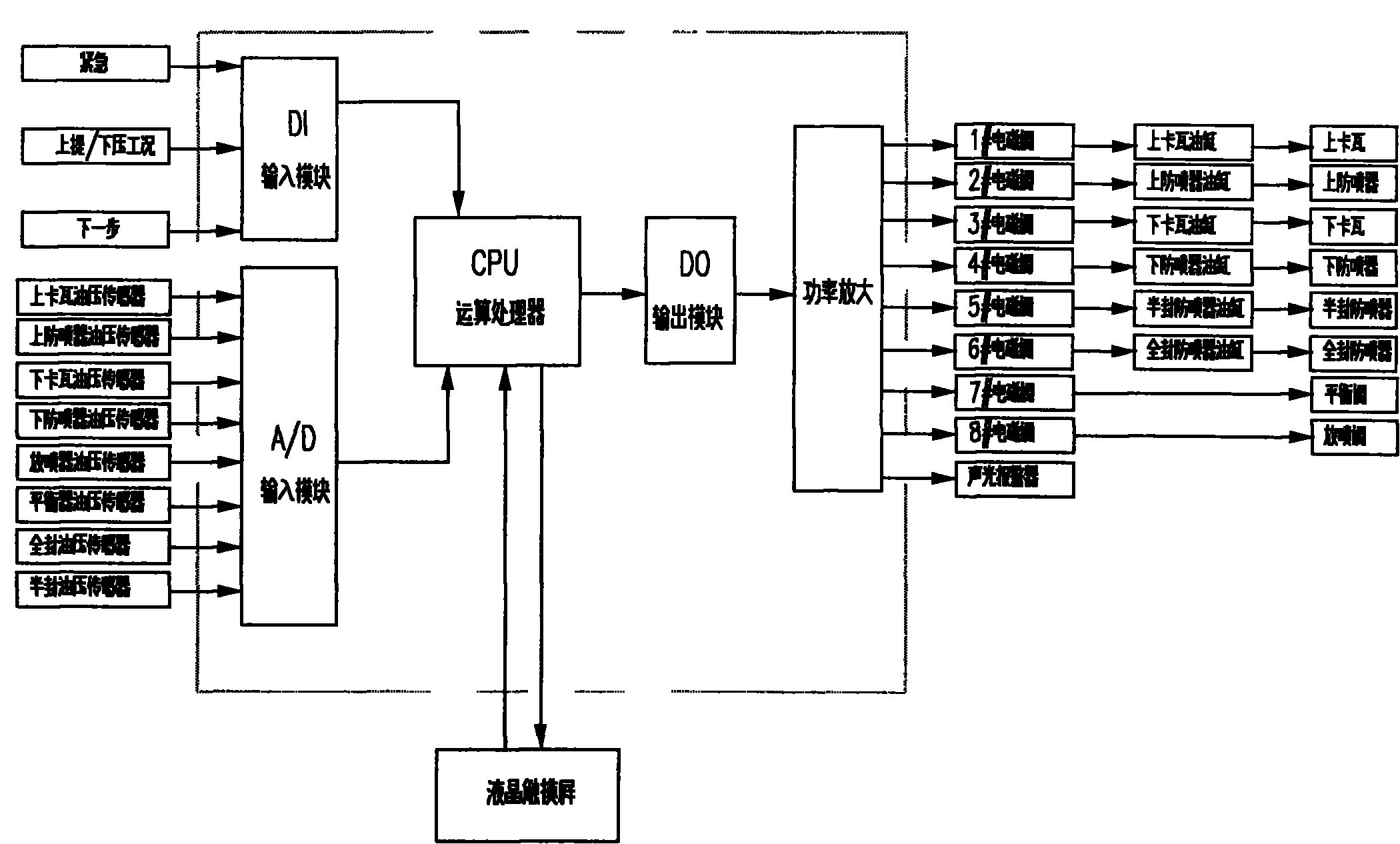
[0015] see figure 1 , figure 2 , during the snubbing workover operation, a tubing clamping mechanism is set in the movement path of the tubing 9 so that the tubing 9 can be clamped in an orderly manner. The tubing clamping mechanism consists of the upper slip 1 and the upper blowout preventer 2 , lower slip 3, lower blowout preventer 4, semi-sealed blowout preventer 5, full-seal blowout preventer 6, balanced shut-off valve 7, blowout shut-off valve 8, etc. The above-mentioned device is connected with the corresponding hydraulic control cylinder through the cam mechanism, and is connected with the eight solenoid valves installed on the platform one by one. At the same time, eight oil pressure sensors are installed one by one on the hydraulic inlet pipe of the above-mentioned oil cylinder and valve On the road, three operating switches of "uplift / down", "next step" and "emergency stop" are installed on the ope...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com