Robot component based on parallel mechanism, optimum design method and robot
A technology of robots and computing methods, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of limited motion space, complex control, and poor stability of robots, so as to improve trajectory planning and motion forms, expand motion space, and improve The effect of stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The preferred embodiments of the present invention are given below in conjunction with the accompanying drawings to describe the technical solution of the present invention in detail.
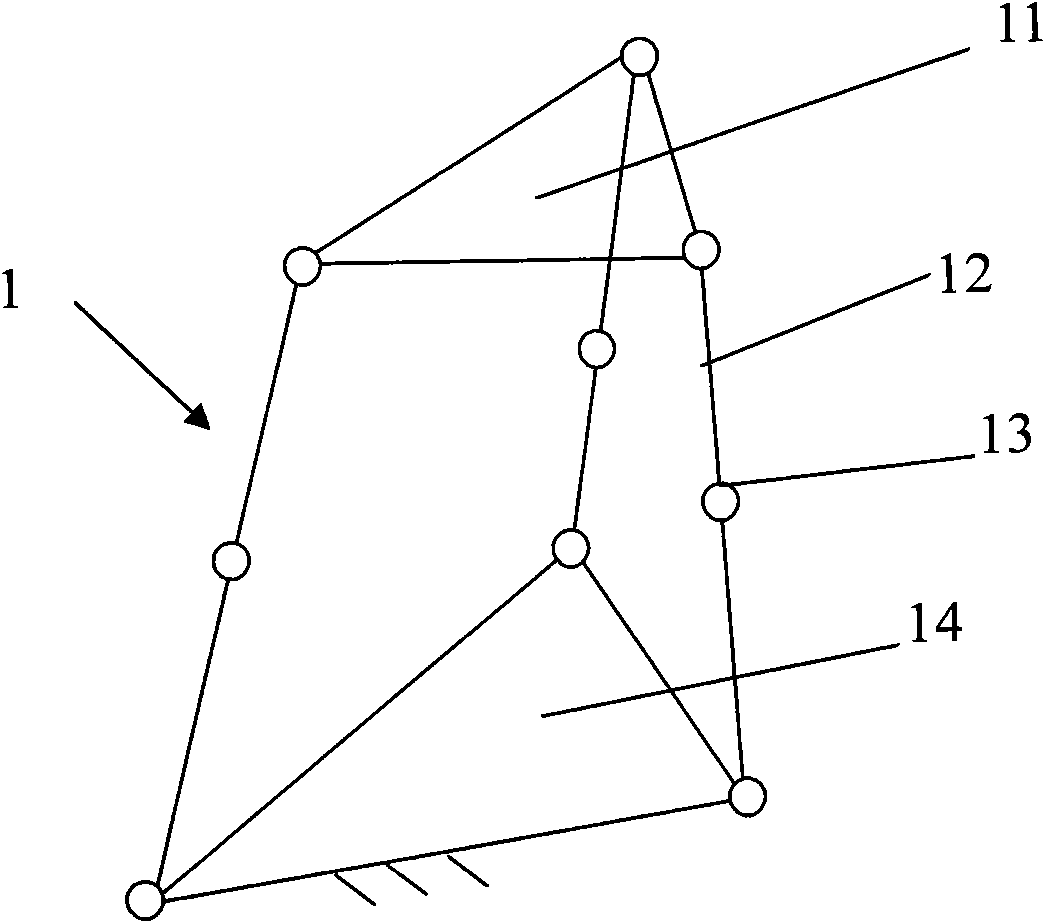
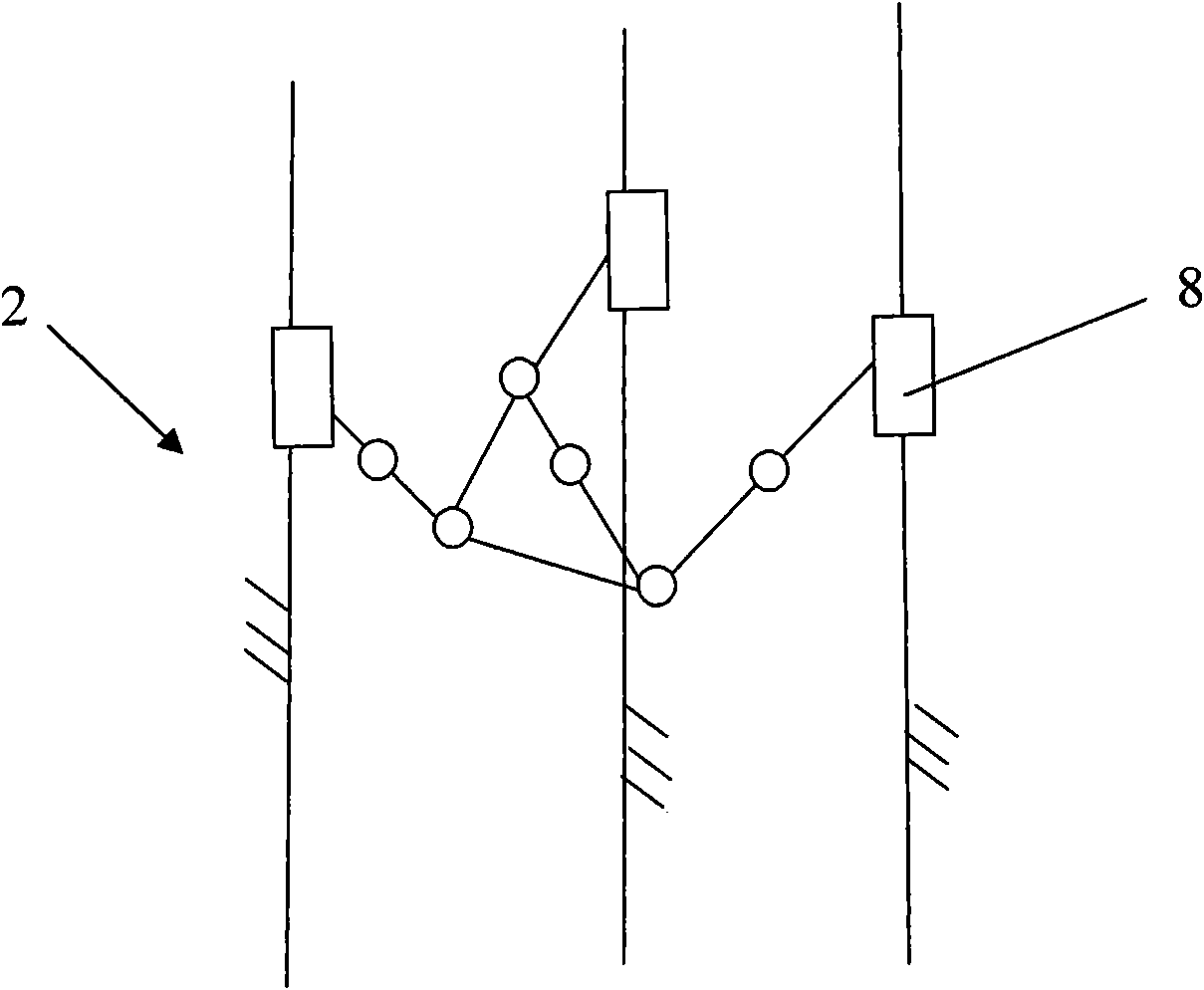
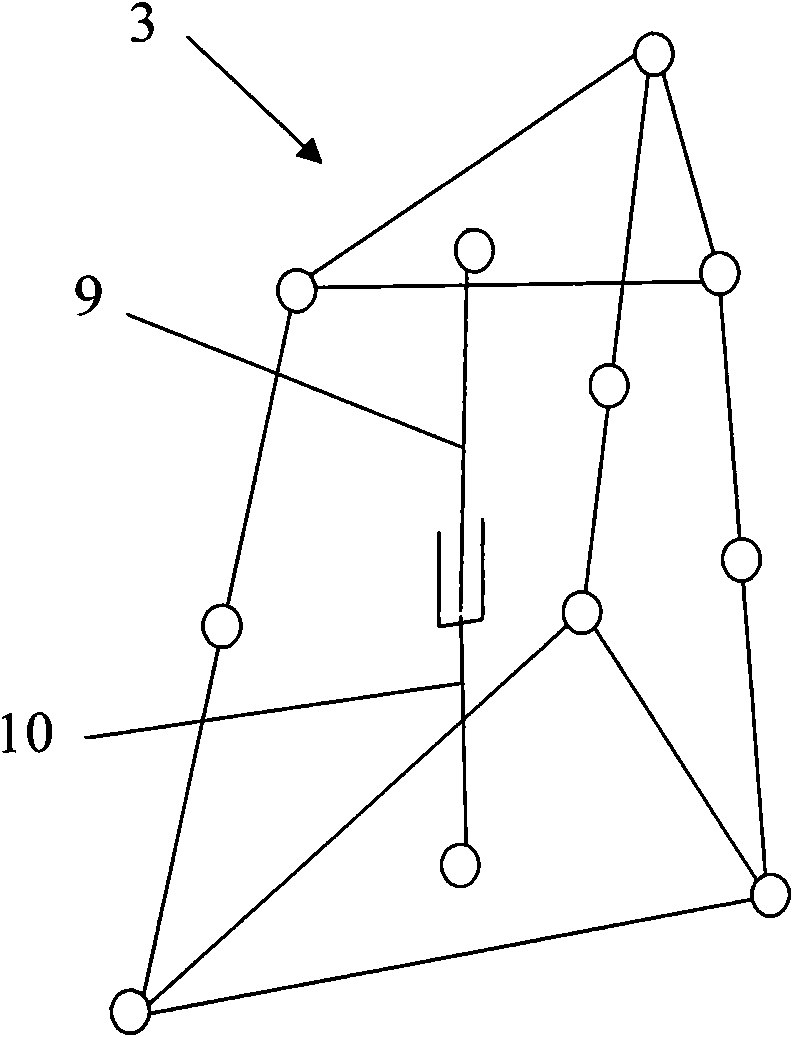
[0043] Figure 1-4 There are four common parallel mechanisms, and those skilled in the art can also use similar parallel mechanisms instead as robot components. In this embodiment, a humanoid robot is taken as an example to illustrate the robot component of the present invention. The humanoid robot includes a parallel mechanism as an executive component, and the executive component includes a head, a chest, an upper arm, a forearm, a thigh, a calf, a hand and a foot. part; a number of motors arranged on the parallel mechanism for driving the parallel mechanism; and spherical pairs used to connect each parallel mechanism. It also includes a control circuit for controlling the movement of the humanoid robot, and the control circuit includes a motor drive board, a signal acquisition board ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com