Multiple-freedom degree wearing type rehabilitation training robot for function of hand and control system thereof
A rehabilitation training and wearable technology, which is applied in the field of rehabilitation robots, can solve the problems of affecting the rehabilitation effect, single training mode, and less freedom, and achieve the effect of improving the rehabilitation effect, easy to wear and unload, and adjustable size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Below in conjunction with accompanying drawing and example the present invention is described in further detail.
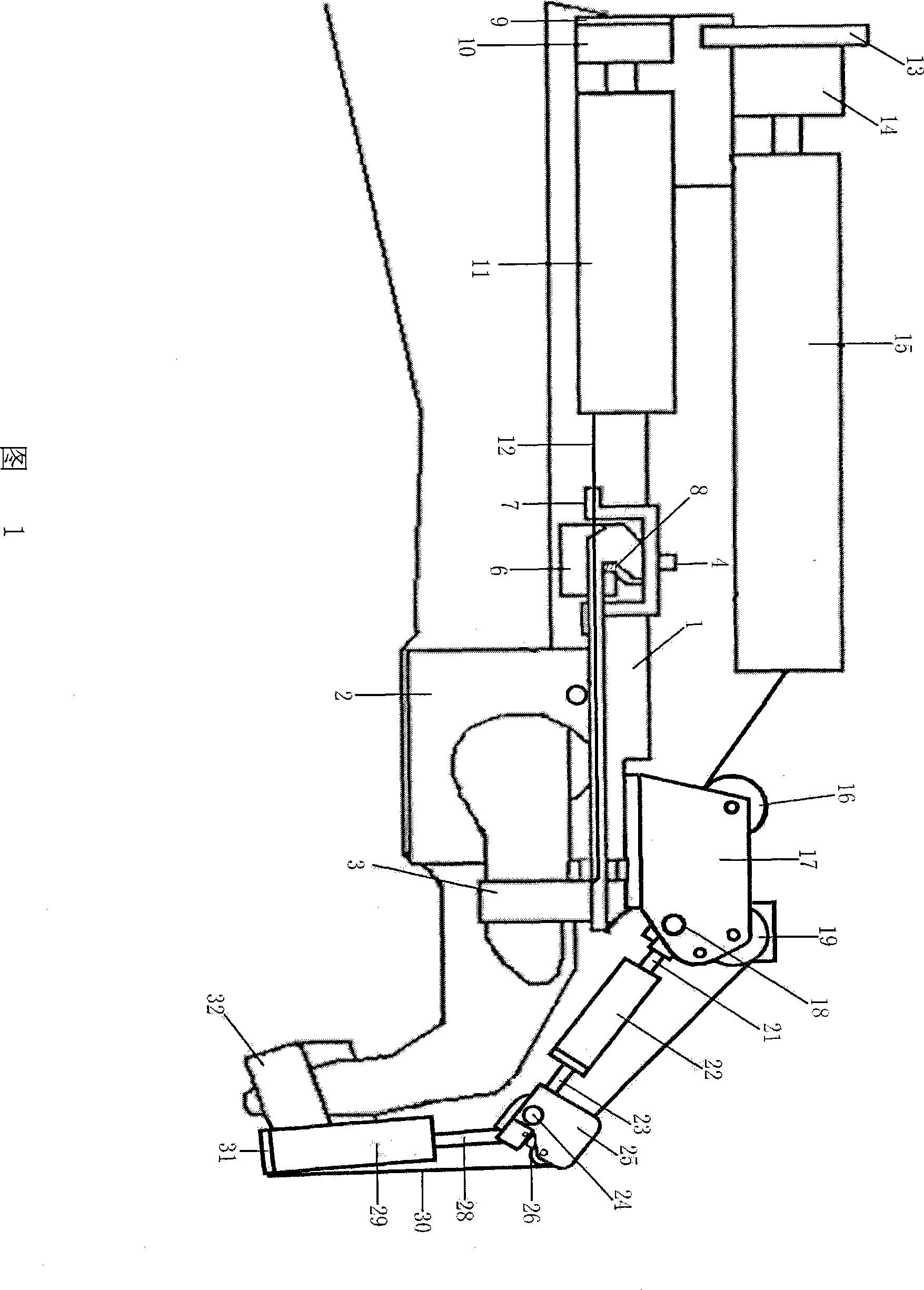
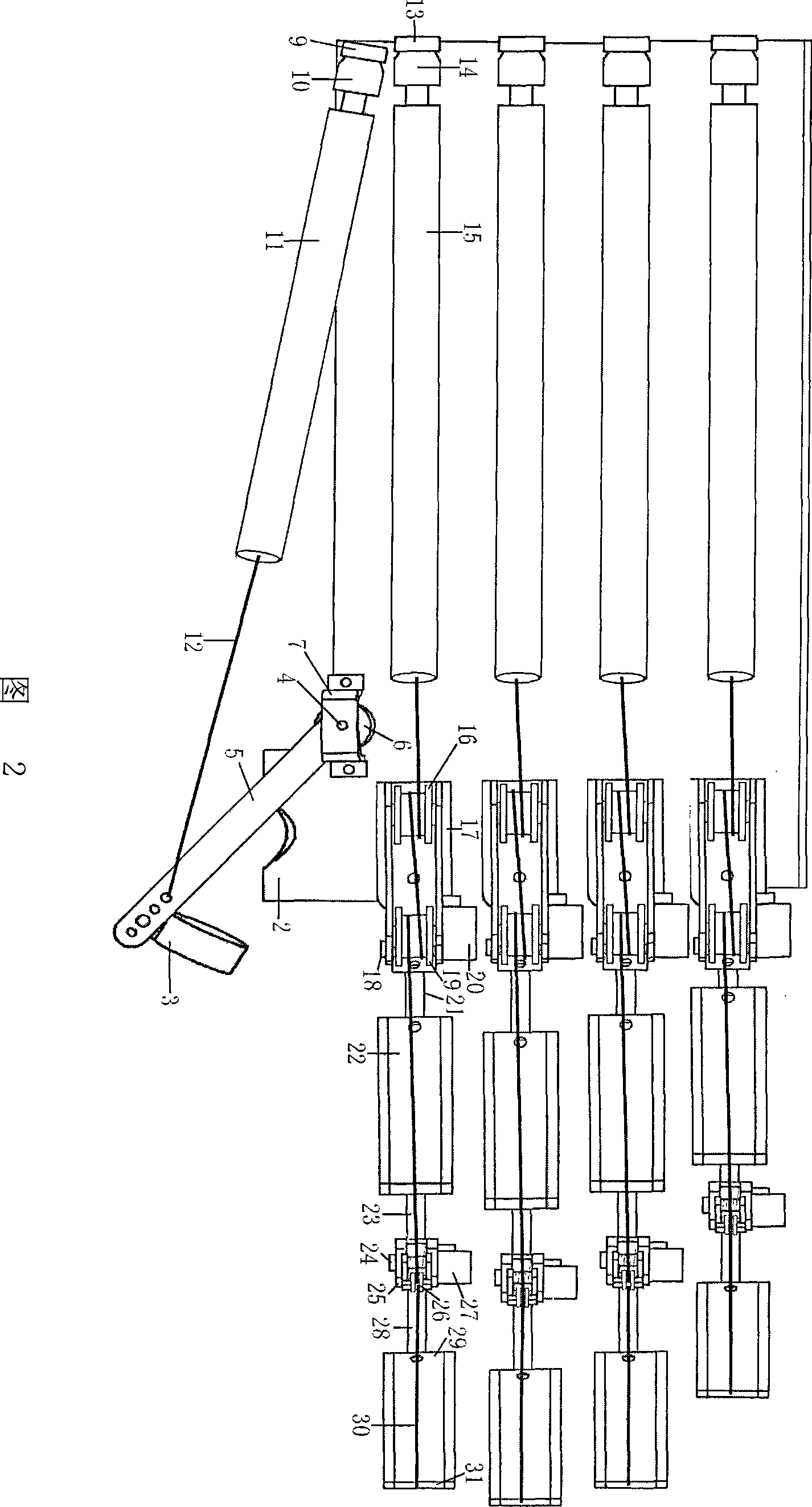
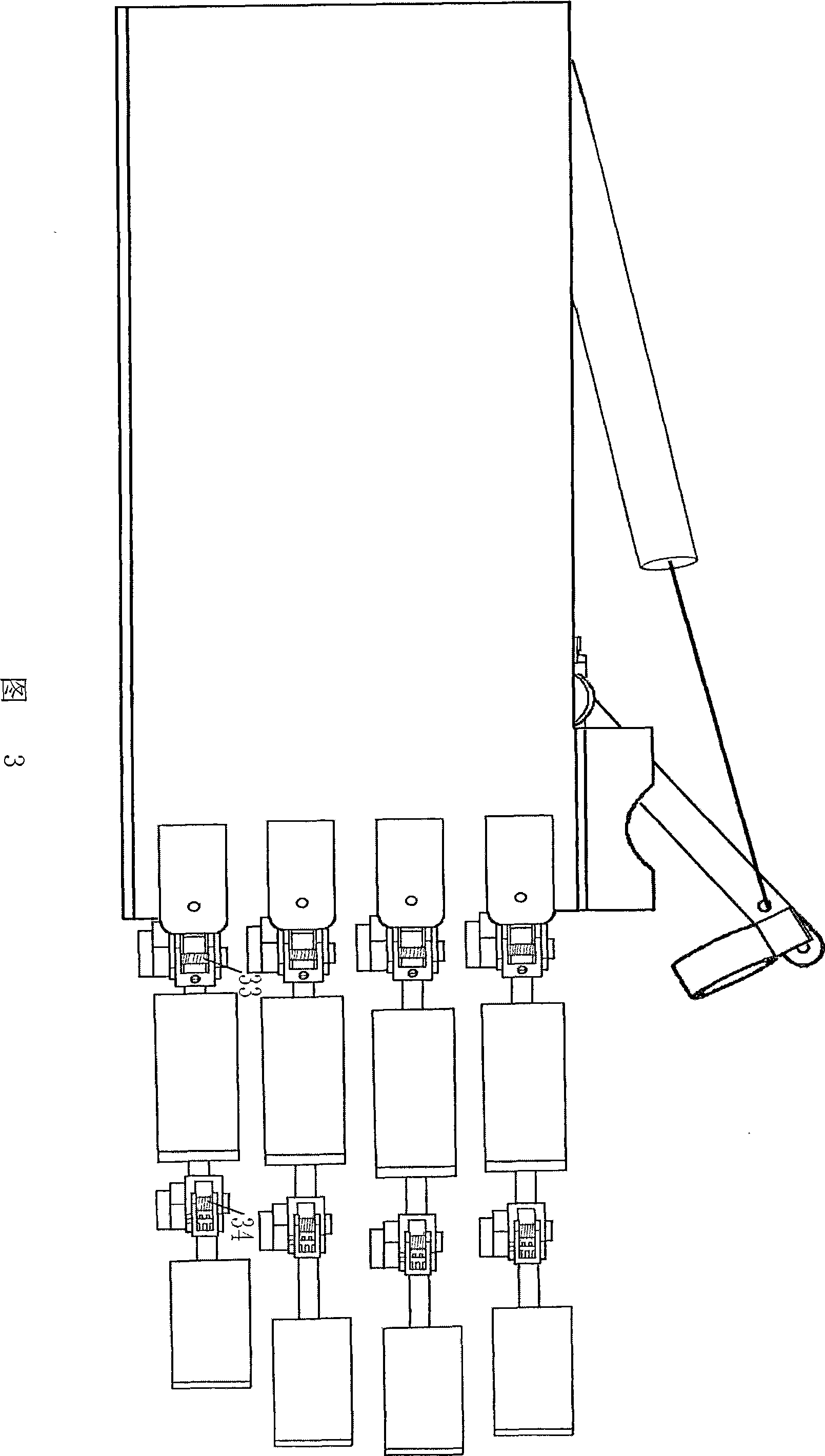
[0032] As shown in Figures 1, 2, 3, and 4, the structure of the wearable hand function rehabilitation robot is:
[0033] The mechanical arm 1 is used to fix the patient's arm and wrist. The first force sensor 10 of the thumb part is installed on the first holder 9 at the rear end of the mechanical arm 1. The first holder 9 is equipped with the first force sensor 10. The first pneumatic muscle The inlet end of 11 is connected with the first force sensor 10 . Thumb support 7 and first thumb cover 2 are installed on the front right side of mechanical arm 1, thumb support 7 links to each other with thumb link 5 by turning pin 4, realizes the motion of thumb. The first angle sensor 6 is equipped with on the rotating pin 4, and is used for measuring the flexion of the thumb, and the second thumb cover 3 is installed below the front end of the thumb connecting ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com