Double L-shaped cubic modularized self-reconstruction robot based on rotary hook hole
A rotary hook and cube technology, applied in the field of robotics, can solve the problems of insufficient flexibility of motion of array robots, inability to move efficiently, and limit self-reconfiguration, and achieve simplified inspection and maintenance processes, suitable for batch manufacturing, and energy saving. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
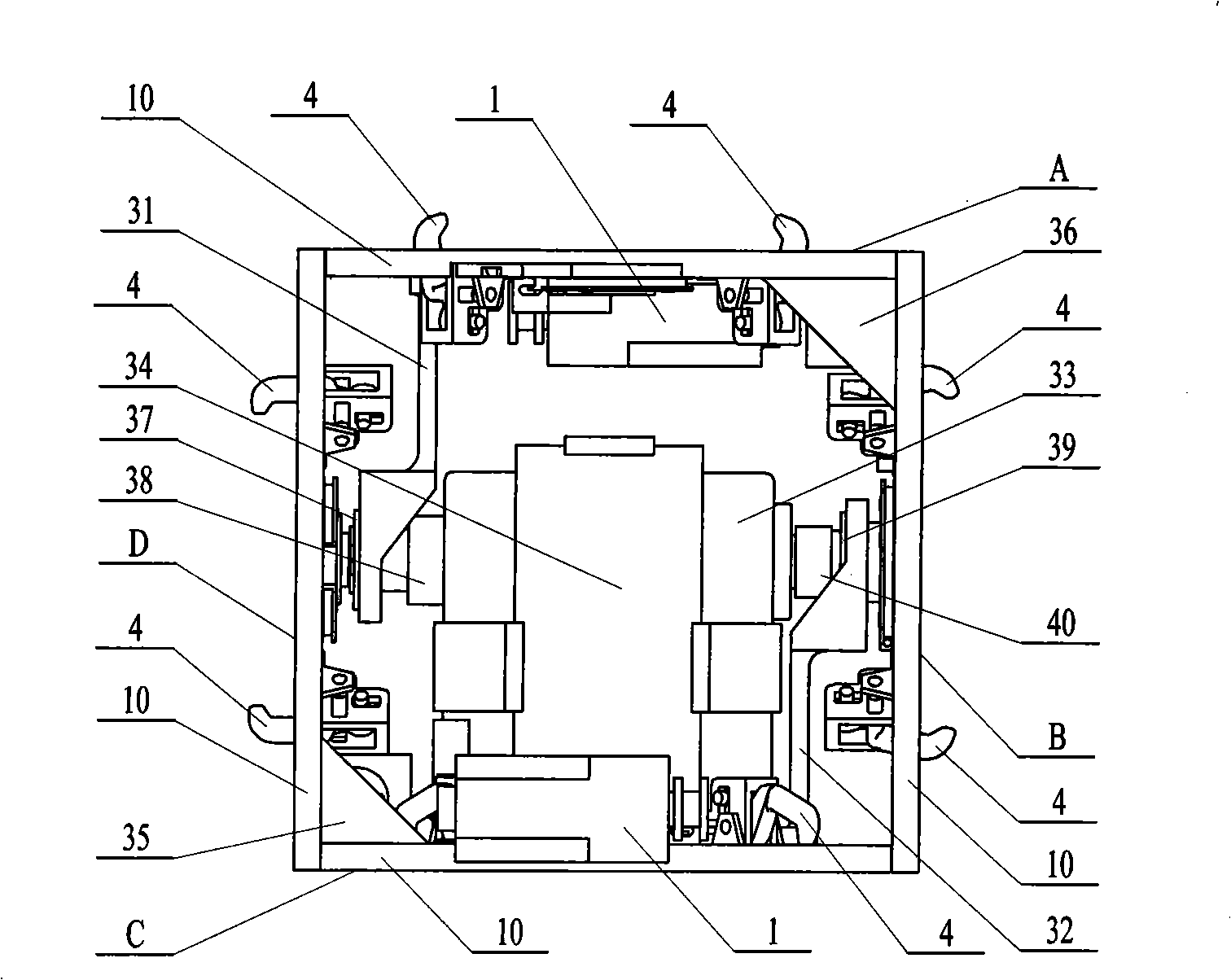
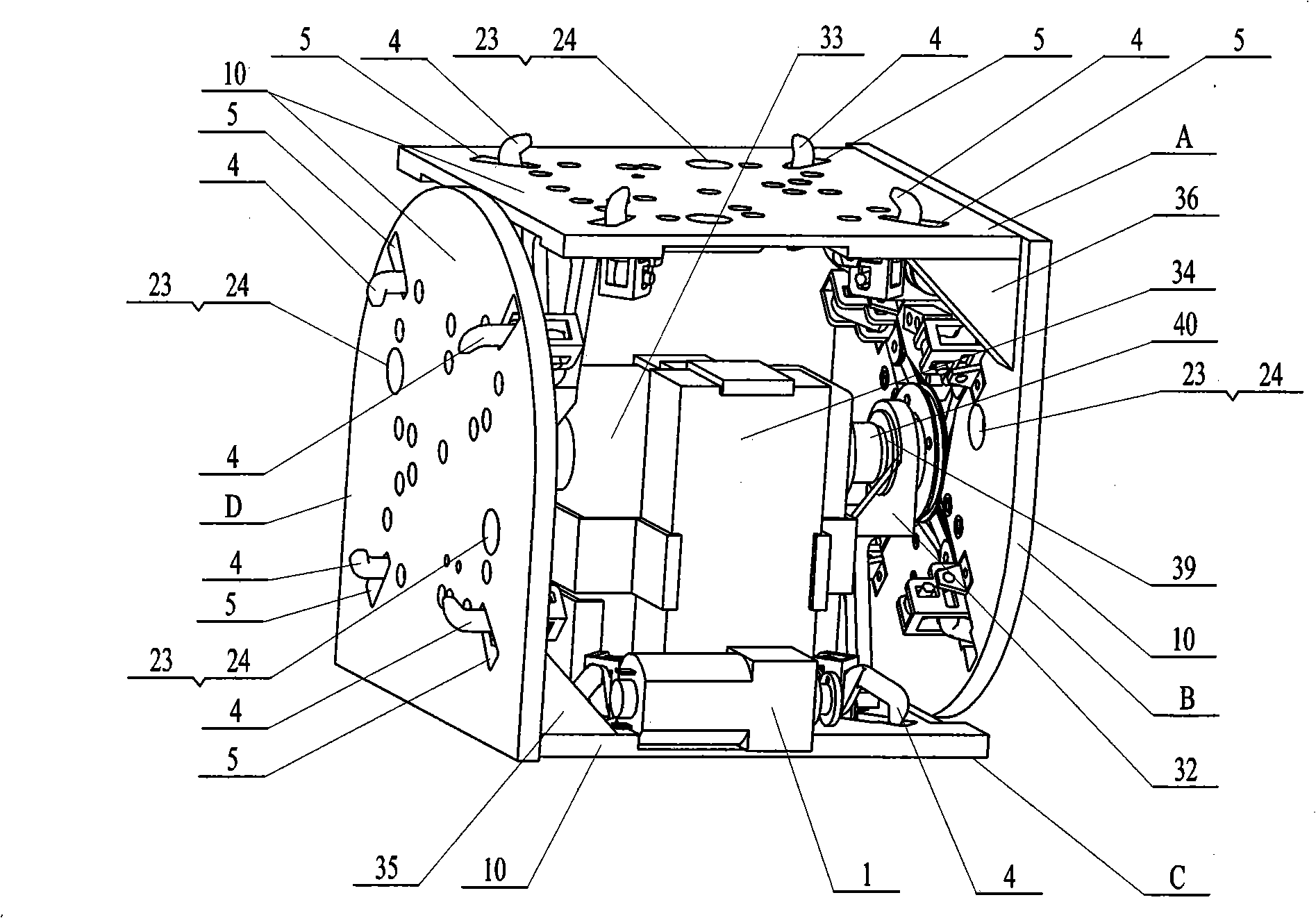
[0014] Specific implementation mode one: (see figure 1 ~ Figure 7) This embodiment consists of an active module and a passive module. The active module consists of a first active connection module A, a second active connection module B, a third active connection module C, a fourth active connection module D, and a first support frame 31. The second support frame 32, the first servo steering gear 33, the first battery 34, the first bearing 37, the support shaft 38 of the first servo steering gear, the second bearing 39 and the torque output shaft of the first servo steering gear 40, one end of the first active connection module A is fixedly connected to one end of the second active connection module B, one end of the third active connection module C is fixedly connected to one end of the fourth active connection module D, and one end of the first support frame 31 It is fixedly connected with the inner side of the first active connection module A, one end of the second support f...
specific Embodiment approach 2
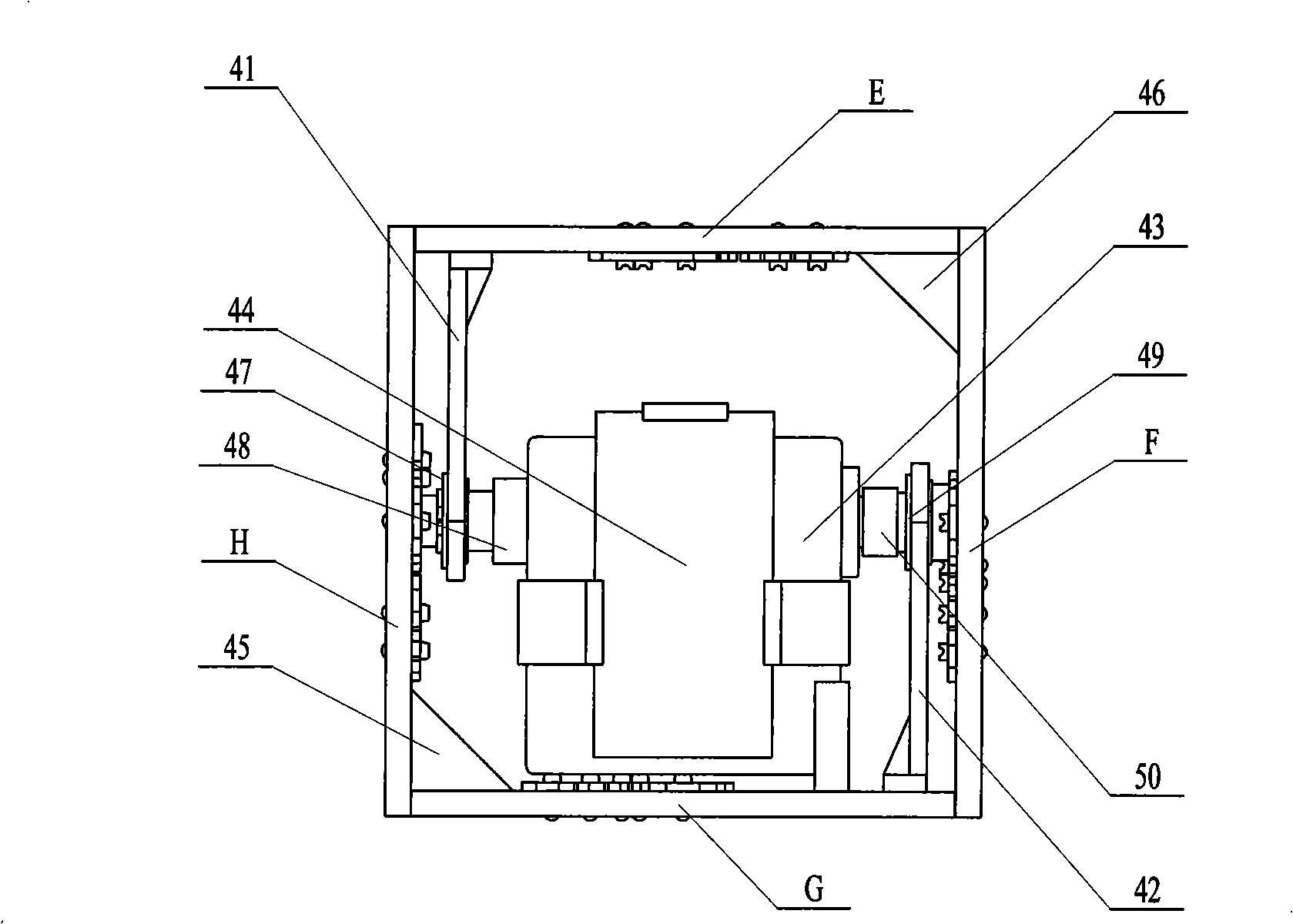
[0015] Specific implementation mode two: (see figure 2 , Figure 4 and Fig. 5) the difference between this embodiment and specific embodiment one is that it has increased four passive connection module permanent magnets 17 and two active connection module permanent magnets 24, the first passive connection module E, the second passive connection module F, the third passive connection module G and the fourth passive connection module H are provided with four tapered holes 14 orthogonally distributed, and a passive connection module permanent magnet 17 is fixed in each tapered hole 14, and each panel 10 There are two tapered holes 23 on the top, and an active connection module permanent magnet 24 is fixed in each tapered hole 23. The two active connection module permanent magnets 24 on each panel 10 are respectively connected to the first passive connection module E, the second passive connection module The two passive connection module permanent magnets 17 on the opposite corn...
specific Embodiment approach 3
[0016] Specific implementation mode three: (see figure 1 ) The difference between this embodiment and the second embodiment is that it adds a first rib 35 and a second rib 36, and the second rib 36 is fixed at the intersection of the first active connection module A and the second active connection module B On the inner wall at , the first rib 35 is fixed on the inner wall at the corner of the third active connection module C and the fourth active connection module D. Others are the same as in the second embodiment. The added first ribs 35 and second ribs 36 play a supporting role on the first active connection module A and the second active connection module B as well as the third active connection module C and the fourth active connection module D.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com