Quick identification method for object vehicle lane changing
A recognition method and target vehicle technology, applied in the direction of electromagnetic wave re-radiation, measuring devices, instruments, etc., can solve the problem of difficult and accurate judgment, untimely response of the algorithm to the state change of the target vehicle, and insufficient stability of fusion and utilization of target vehicle identification and tracking And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
[0135] On the domestic Jetta AT car platform, environmental information perception is accomplished through a monocular camera and a laser radar. The monocular camera uses a German Basler A601fCMOS camera, and the laser radar uses a CAN bus radar produced by Denso.
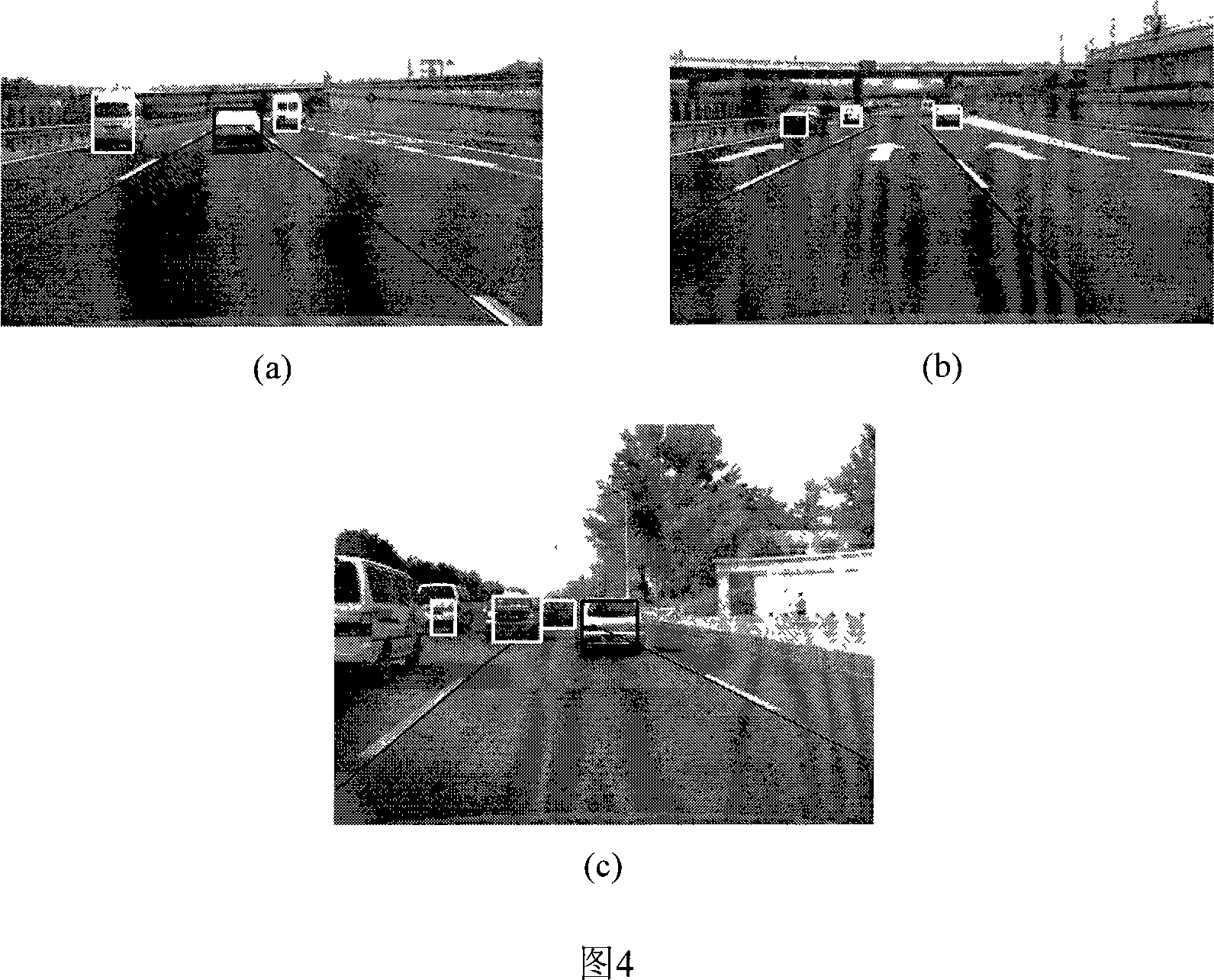
[0136] The effect of target car recognition is shown in Figure 4. In the figure, the black line is the recognized lane line position, the white box is the recognized vehicle position, and the black box is the recognized target car position. It can be seen that after identifying multiple vehicles, the algorithm can accurately select following targets or dangerous targets. When multiple vehicles driving on the road do not pose a threat to the vehicle, the algorithm can also make accurate judgments , and when a car cuts in ahead, the algorithm can respond in a more timely manner, taking the cut-in vehicle as the car-following target.
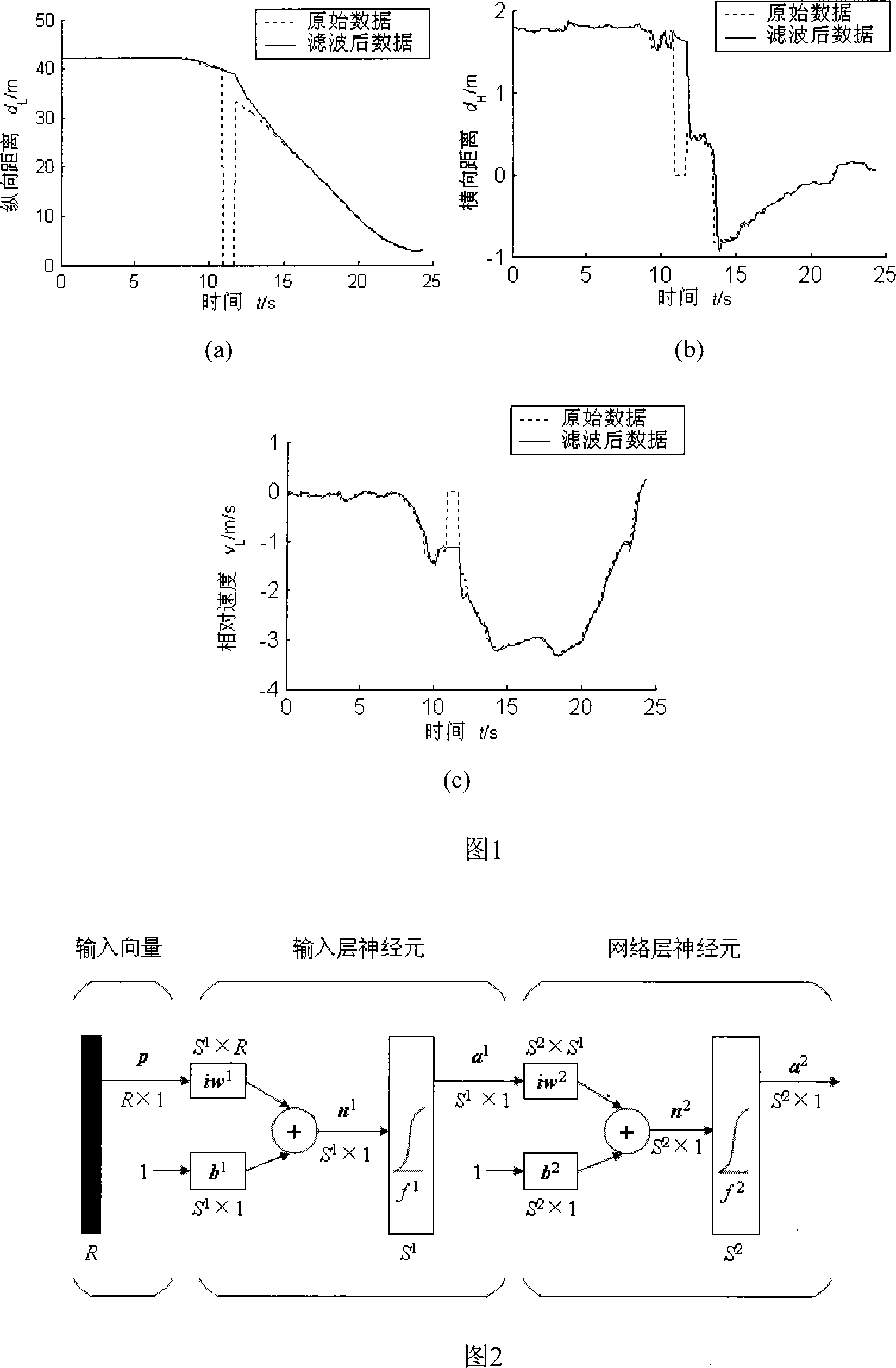
[0137] The data of the target car in the test is recorded, and the parameters when...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com