Variable Resistance Exercise and Rehabilitation Hand Device
a hand device and resistance exercise technology, applied in the field of variable resistance exercise and rehabilitation hand devices, can solve the problem of limited range of exercises that are available with these devices
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
example i
Hand Rehabilitation Device with Pincer Handle Motion and Rotary Brake
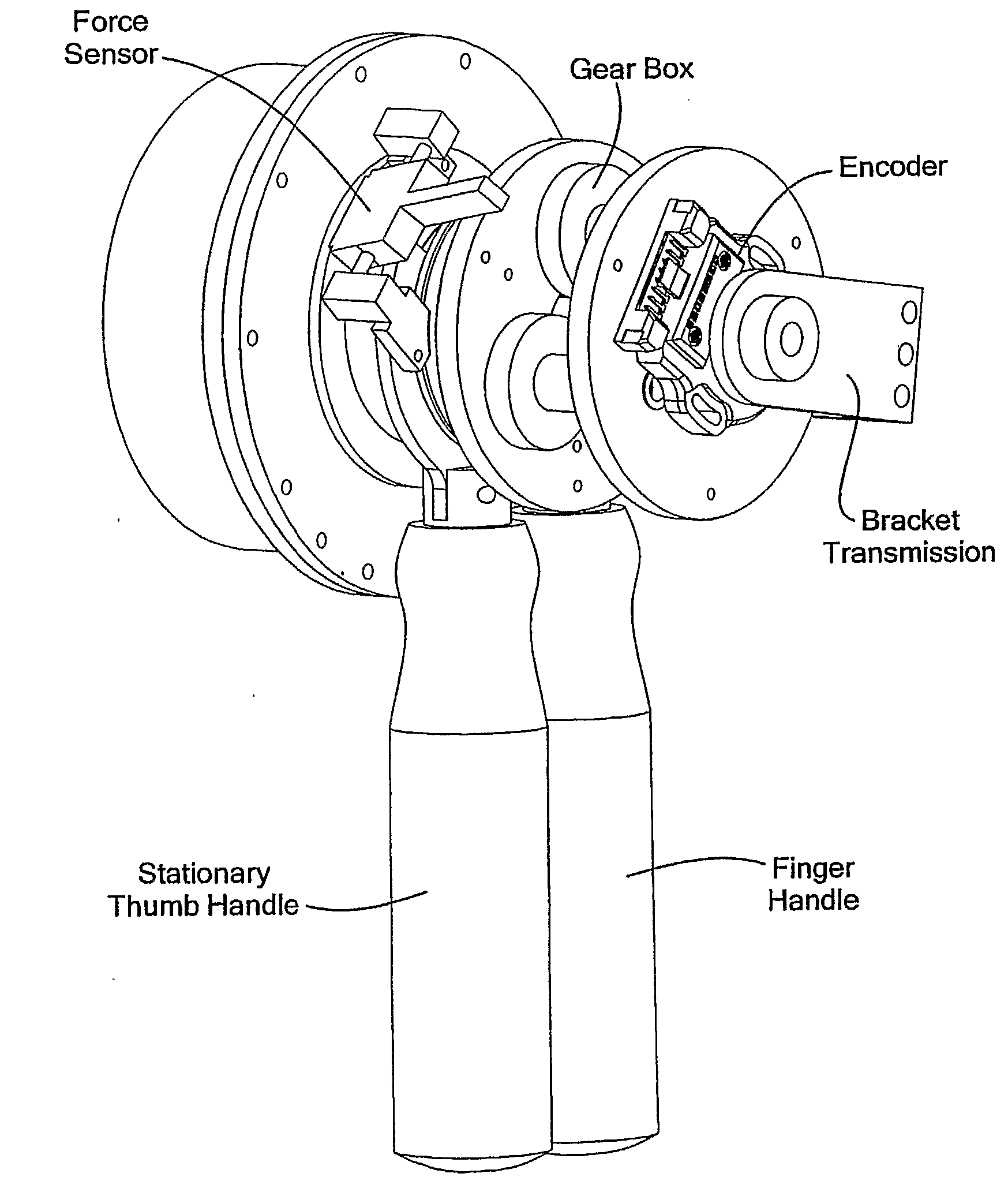
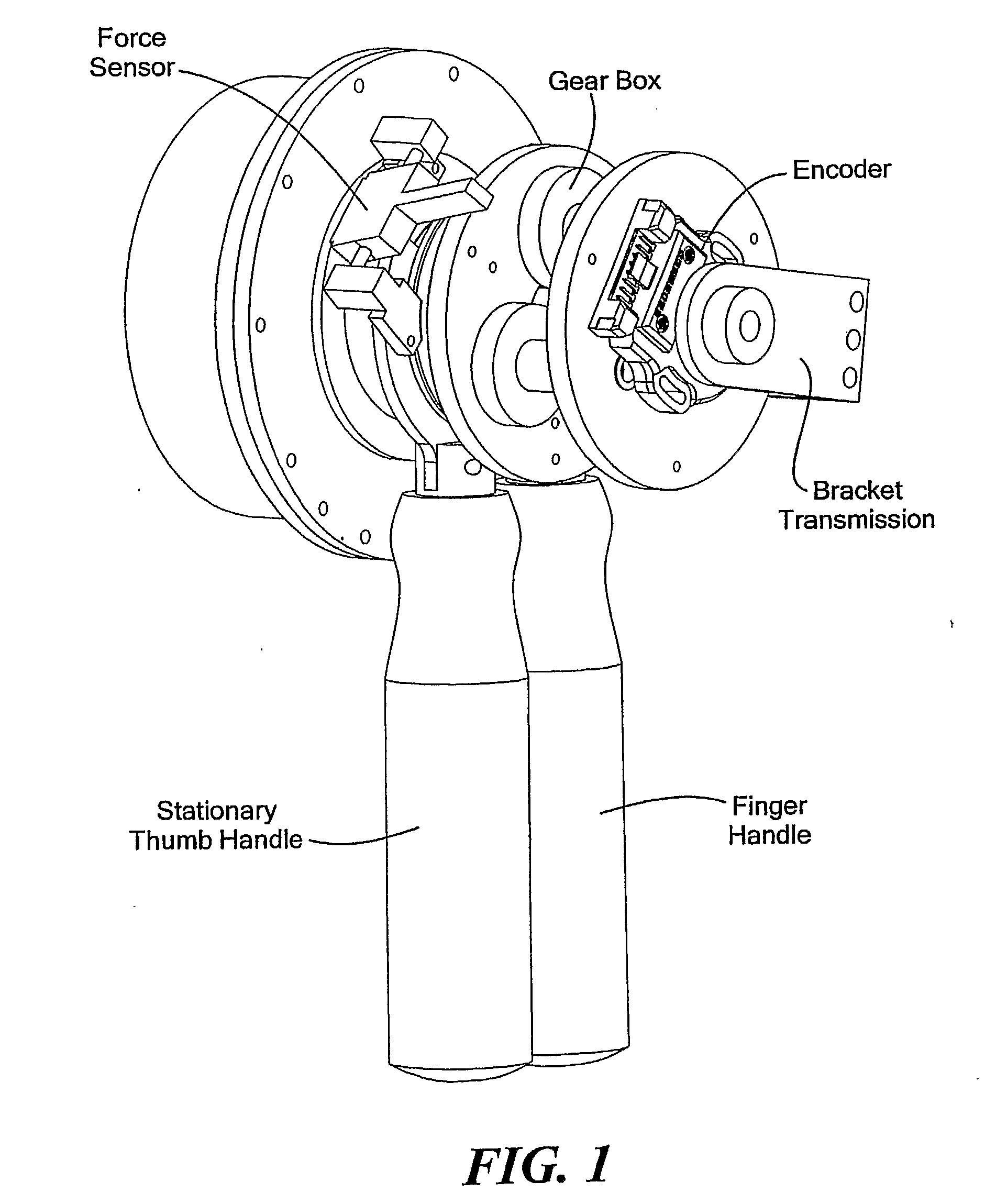
[0039]This design for the novel hand rehabilitation device consists of four major subsystems: a) an ERF resistive element; b) a gearbox; c) handles and d) two sensors, one optical encoder and one force sensor, to measure the patient induced motion and force. Each subsystem includes several components of varying complexity. In general, all of the components were designed, with strength and safety in mind, to be non-magnetic, and optimized for regular and high-stress testing. The device is made of polymers (plastic) and non magnetic materials, so it can be used in a wide variety of environments including high magnetic fields.
[0040]The maximum gripping force that can be generated by the hand in males is 400 N and in females 228 N. All components were designed so that the device is capable of applying 150 N of force at the human operator's hand holding the device's handles (approximately 50% of a healthy hand's grippin...
example ii
Hand Rehabilitation Device with Linear Handle Motion and Rotary Brake
[0047]This proposed design for the novel hand rehabilitation device consists of five major subsystems: a) an ERF resistive element; b) a gearbox; c) ratchet system; d) handles and e) two sensors, one optical encoder and one force sensor, to measure the patient induced motion and force. Each subsystem includes several components of varying complexity. In general, all of the components were designed, with strength and safety in mind, to be non-magnetic, and optimized for regular and high-stress testing. The smart hand rehabilitation device is configured to rest next to the person so no weight would be felt by the individual. The device is made of polymers (plastic) and non magnetic materials, so it can be used in a wide variety of environments including high magnetic fields.
[0048]The maximum gripping force that can be generated by the hand in males is 400 N and in females 228 N. All components were designed so that t...
example iii
Hand Rehabilitation Device with Linear Handle Motion and Linear Damper
[0059]A second configuration of the hand device places a linear damper in line with the direction of motion. A novel ERF “concentric channel” damper (ERF-CCD) (FIGS. 12A and 12B) has been designed. There are several advantages to a linear configuration including decreased device complexity, reduced part count, and elimination of the need for gears, and a ratchet subsystem. The outer case of the damper is attached to the frame. The shaft attaches directly to the force sensor. Motion is captured using a linear encoder or a rotary encoder modified for linear use. The return force is provided by two springs or “bungie” cords that can be adjusted in length and stiffness. The overall stroke of the device can be quickly adjusted using shaft collars.
[0060]In commercially available linear ERF dampers, fluid flows through channels in or around outside of the piston. For these designs, to obtain maximum damping the piston mu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com