Simulation test device for visual navigation algorithm of soft landing of deep-space detector
A technology for deep space detectors and visual navigation, which is applied in the directions of measuring devices, surveying and navigation, and testing of machine/structural components. And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
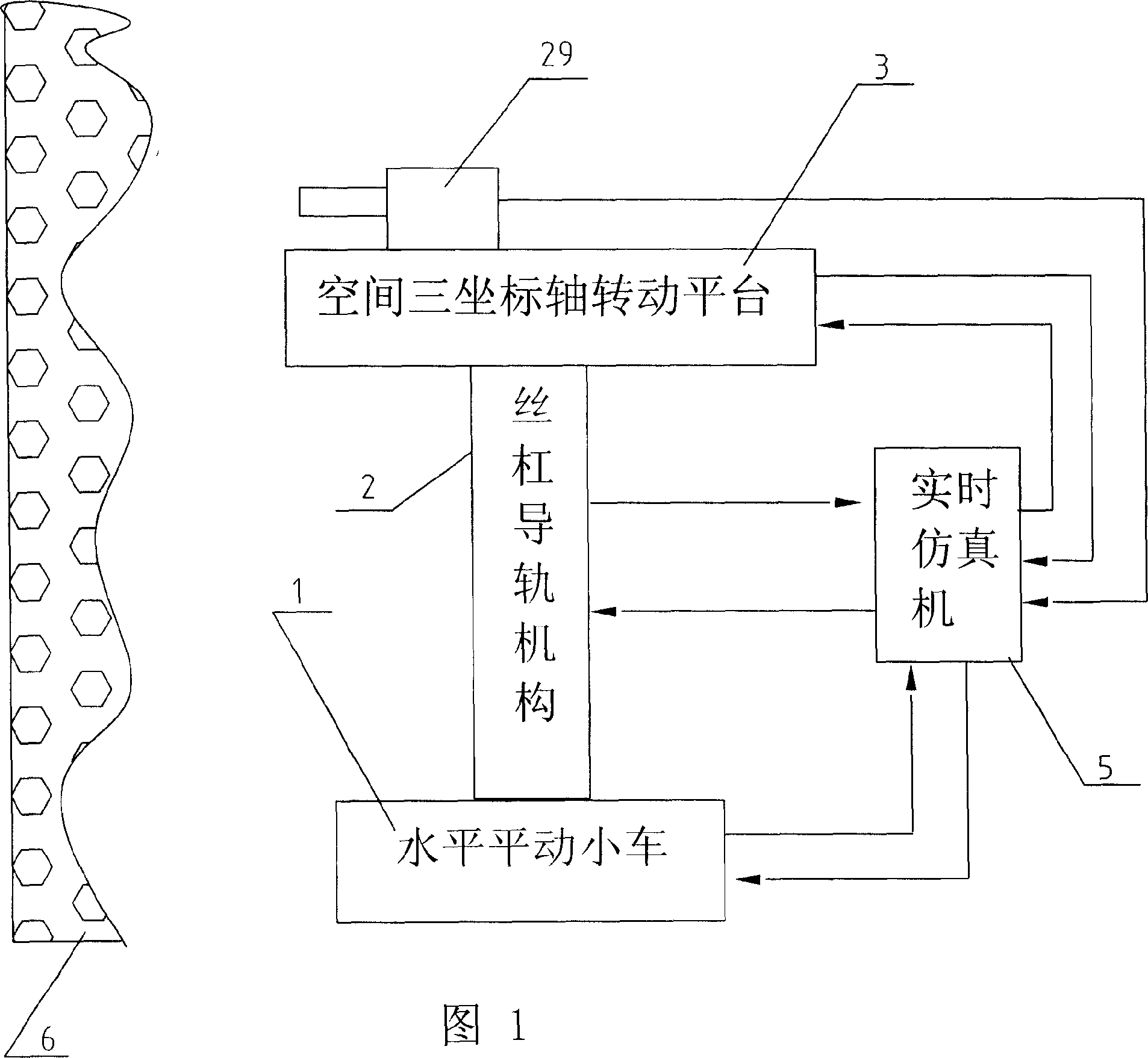
[0015] Specific Embodiment 1: The present embodiment will be specifically described below with reference to FIG. 1 . it consists of
[0016] The side surface simulates the landscape simulation sand table 6 on the surface of the target star;
[0017] The navigation camera 29 is to capture the side surface information of the scene simulation sand table 6 corresponding to the camera lens of the navigation camera 29 in real time;
[0018] The real-time simulator 5 is used to receive the information taken by the navigation camera 29 and generate position and attitude adjustment commands in real time; the described real-time simulator is provided with a pose simulation control program and an autonomous optical navigation program;
[0019] Horizontally moving the trolley 1 to receive the position and attitude adjustment commands of the real-time simulator 5, make corresponding movements in the horizontal plane, and feed back the position variation generated by the motion to the real...
specific Embodiment approach 2
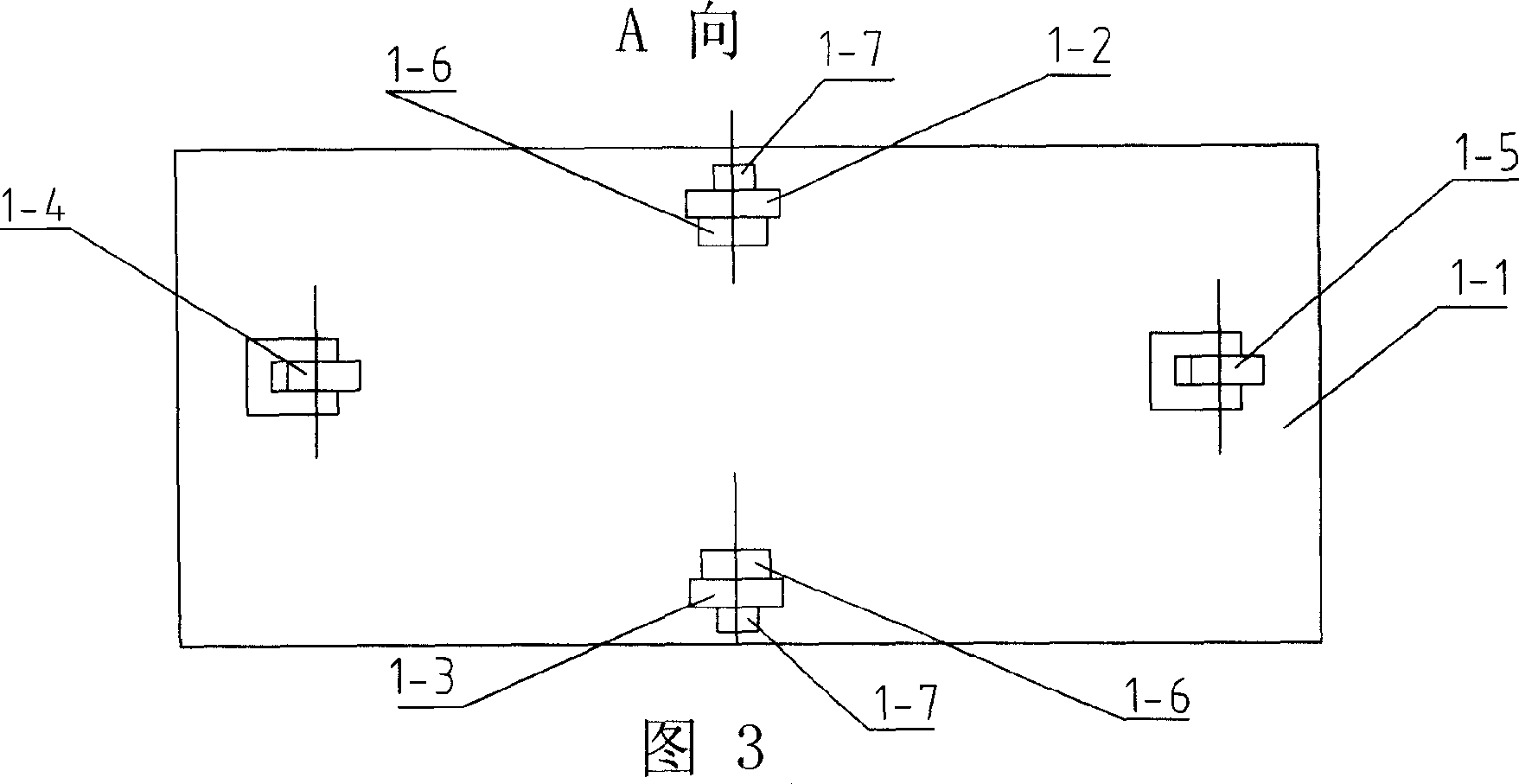
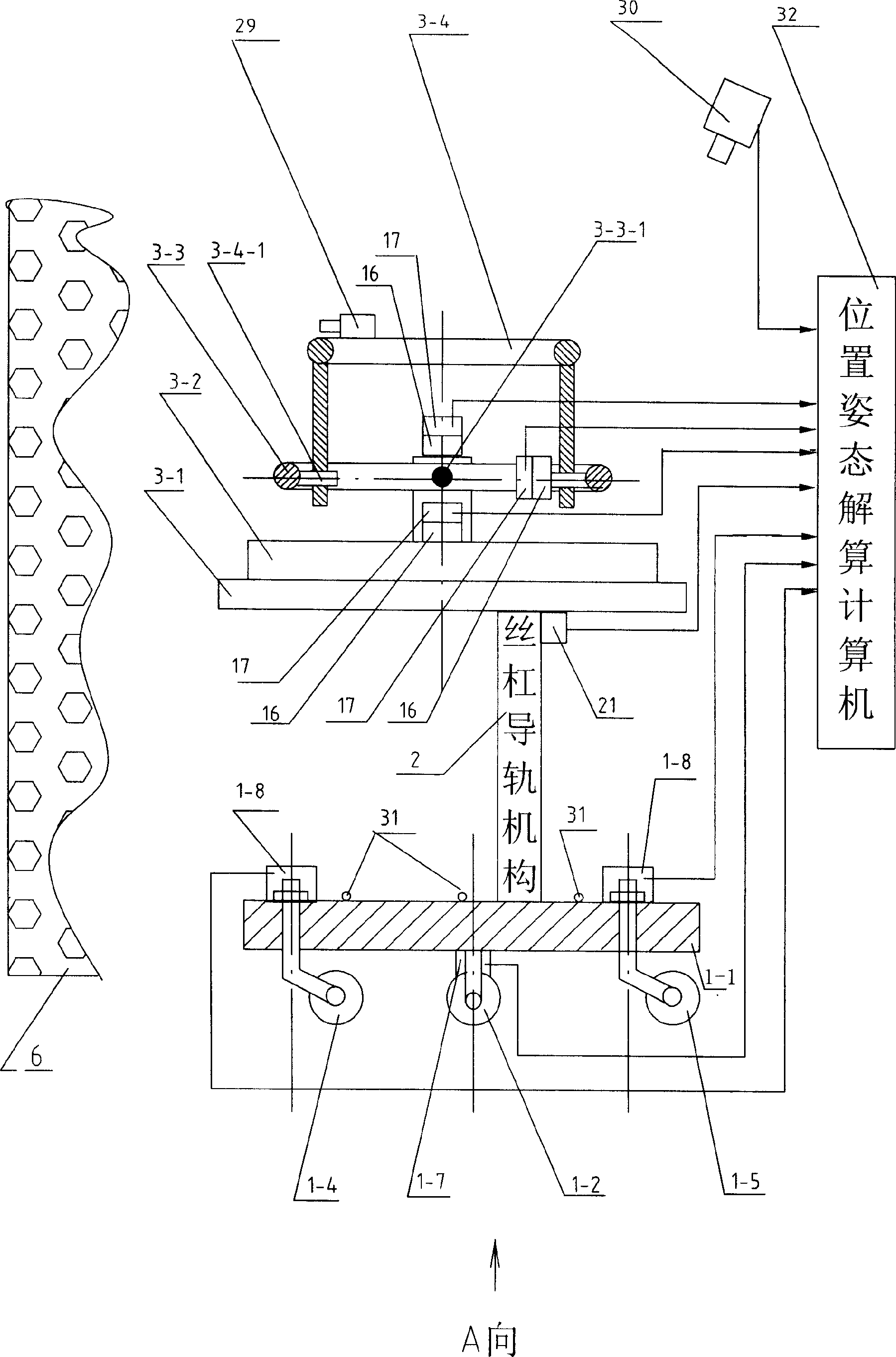
[0027] Specific implementation mode two: the following combination figure 2 This embodiment will be specifically described with FIG. 3 . The difference between this embodiment and Embodiment 1 is: the horizontal translation trolley 1 is composed of a car body platform 1-1, a first driving wheel 1-2, a second driving wheel 1-3, a first guide wheel 1-4, a second driving wheel Two guide wheels 1-5, two torque motors 1-6, two angular displacement sensors 1-7 and two deflection angle displacement sensors 1-8, the first driving wheel 1-2, the second driving wheel 1-3 Set on both sides of the vehicle body platform 1-1 and driven by a torque motor 1-6 respectively, the first guide wheel 1-4 and the second guide wheel 1-5 are respectively arranged at the front of the vehicle body platform 1-1 and the rear, a deflection angle displacement sensor 1-8 is arranged respectively between the first guide wheel 1-4 and the second guide wheel 1-5 and the car body platform 1-1, when the car body...
specific Embodiment approach 3
[0028] Specific implementation mode three: the following combination figure 2This embodiment will be specifically described. The difference between this embodiment and the second embodiment is that the space three-coordinate axis rotating platform 3 is composed of a supporting platform 3-1, a rotating platform 3-2 that is located on the supporting platform 3-1 and can rotate in the horizontal plane, and a pitching motion. frame 3-3, rolling motion frame 3-4, three torque motors 16 and three encoders 17, the supporting platform 3-1 is connected with the screw guide mechanism 2 to accept its adjustment in the height direction, The rotary table 3-2 is connected with a torque motor 16 to accept its drive, the rotary table 3-2 is connected with an encoder 17 to measure the rotation angle in real time, and the pitch motion frame 3-3 passes through the hinge shaft 3-3-1 Hinged on the upper surface of the turntable 3-2, the pitch motion frame 3-3 is connected with a torque motor 16 t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com