Whole attitude angle updating method applied to agricultural machinery and based on nine-axis MEMS (micro-electromechanical system) sensor
A technology for agricultural machinery and updating methods, which is applied in the field of measurement and can solve problems such as incomplete application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
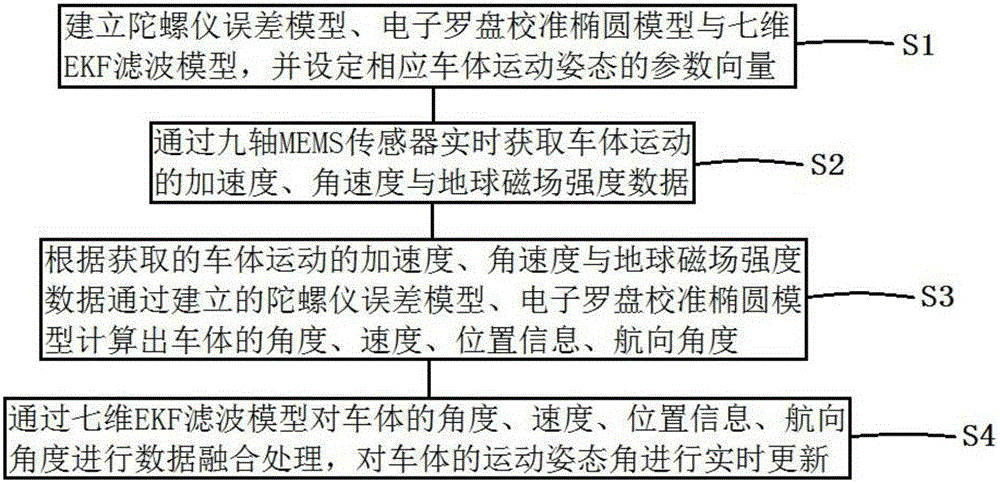
[0058] like figure 1 As shown, a method for updating the full attitude angle of agricultural machinery based on the nine-axis MEMS sensor, the method for updating the full attitude angle of the agricultural machinery based on the nine-axis MEMS sensor includes the following steps:
[0059] Step S1: Establish a gyroscope error model, an electronic compass calibration ellipse model and a seven-dimensional EKF filter model, and set the parameter vector of the corresponding vehicle body motion attitude;
[0060] The step S1: establishing the gyroscope error model, the electronic compass calibration ellipse model and the seven-dimensional EKF filter model, and setting the parameter vector of the corresponding vehicle body motion attitude. The specific steps are:
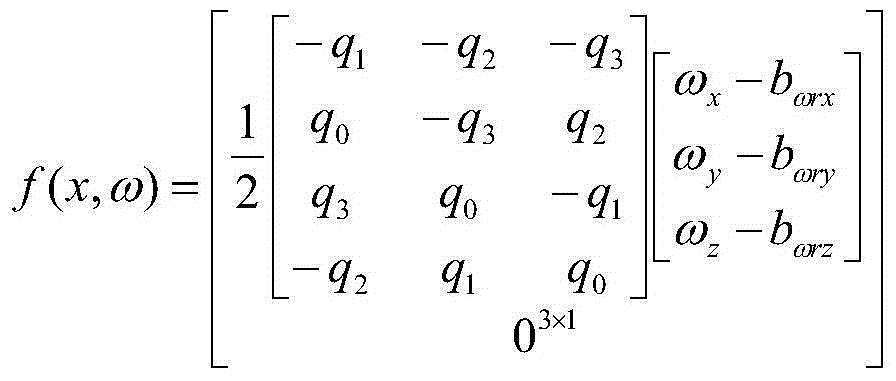
[0061] The gyroscope error model calculates the angular velocity of the gyroscope through the gyroscope error calculation formula, where the gyroscope error calculation formula is: ω=ω ib +b ωr +b ωg , where ω is the o...
Embodiment 2
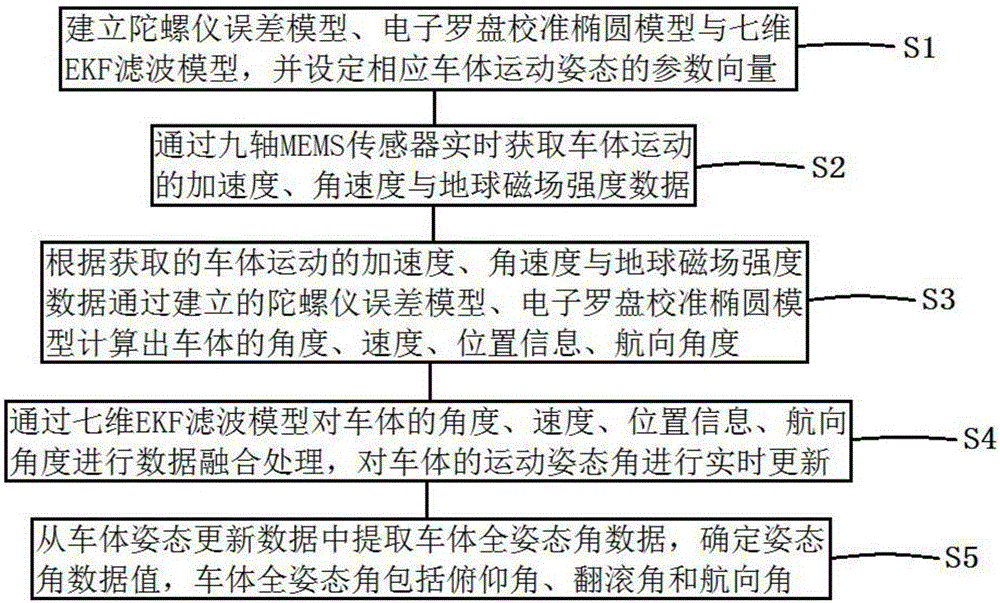
[0099] like figure 2 As shown, a method for updating the full attitude angle of agricultural machinery based on the nine-axis MEMS sensor, the method for updating the full attitude angle of the agricultural machinery based on the nine-axis MEMS sensor includes the following steps:
[0100] Step S1: Establish a gyroscope error model, an electronic compass calibration ellipse model and a seven-dimensional EKF filter model, and set the parameter vector of the corresponding vehicle body motion attitude;
[0101] The step S1: establishing the gyroscope error model, the electronic compass calibration ellipse model and the seven-dimensional EKF filter model, and setting the parameter vector of the corresponding vehicle body motion attitude. The specific steps are:
[0102] The gyroscope error model calculates the angular velocity of the gyroscope through the gyroscope error calculation formula, where the gyroscope error calculation formula is: ω=ω ib +b ωr +b ωg , where ω is the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com