Robot pneumatic shillful hand
A robot and dexterous hand technology, which is applied in the field of robotic pneumatic dexterous hands, can solve the problems that the end manipulator of the robot cannot meet the production requirements, the clamping method is single, and it is difficult to control accurately, and achieve the effect of compact structure, flexible operation and easy processing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] Below in conjunction with accompanying drawing and embodiment the present invention will be further described
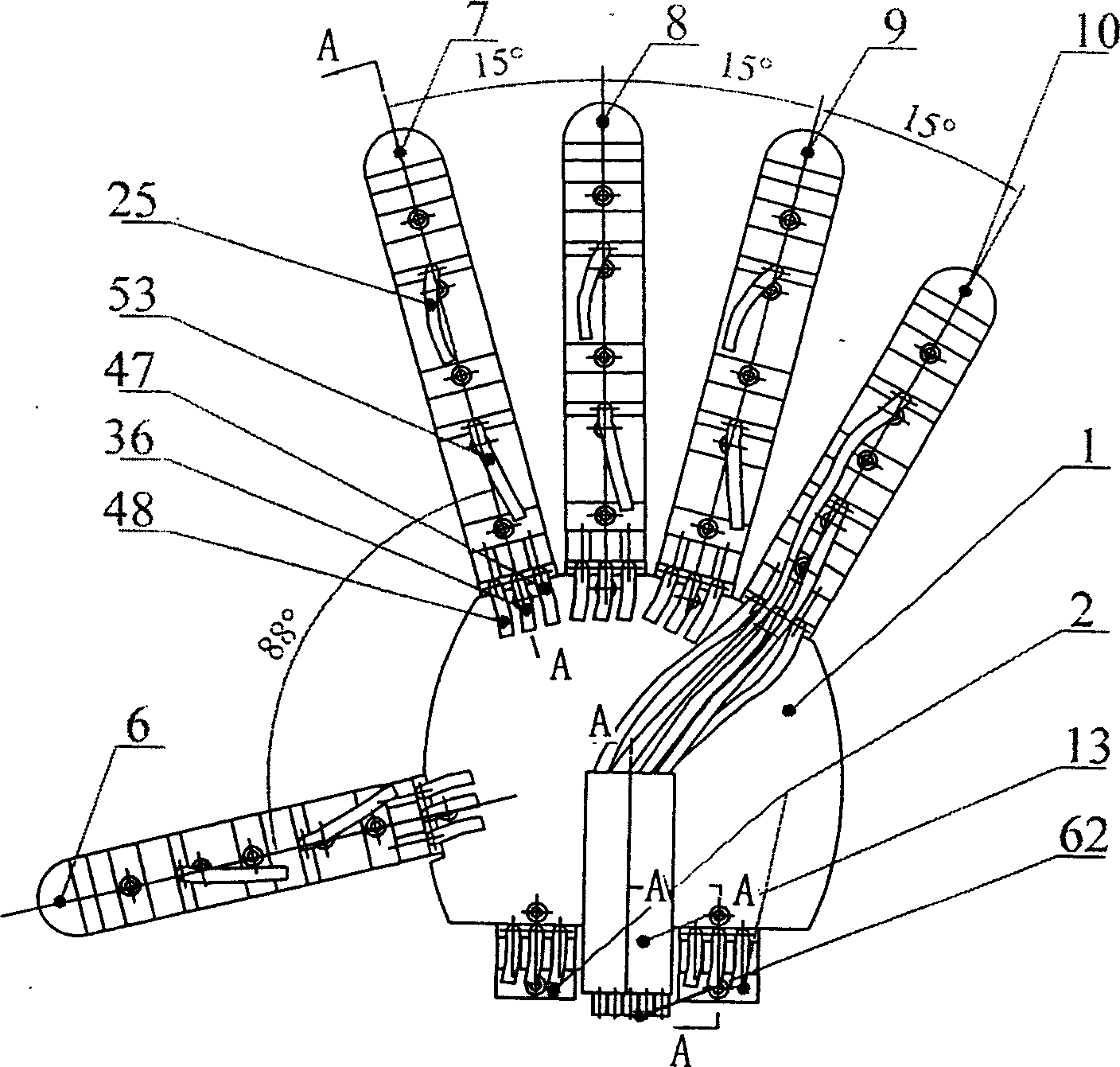
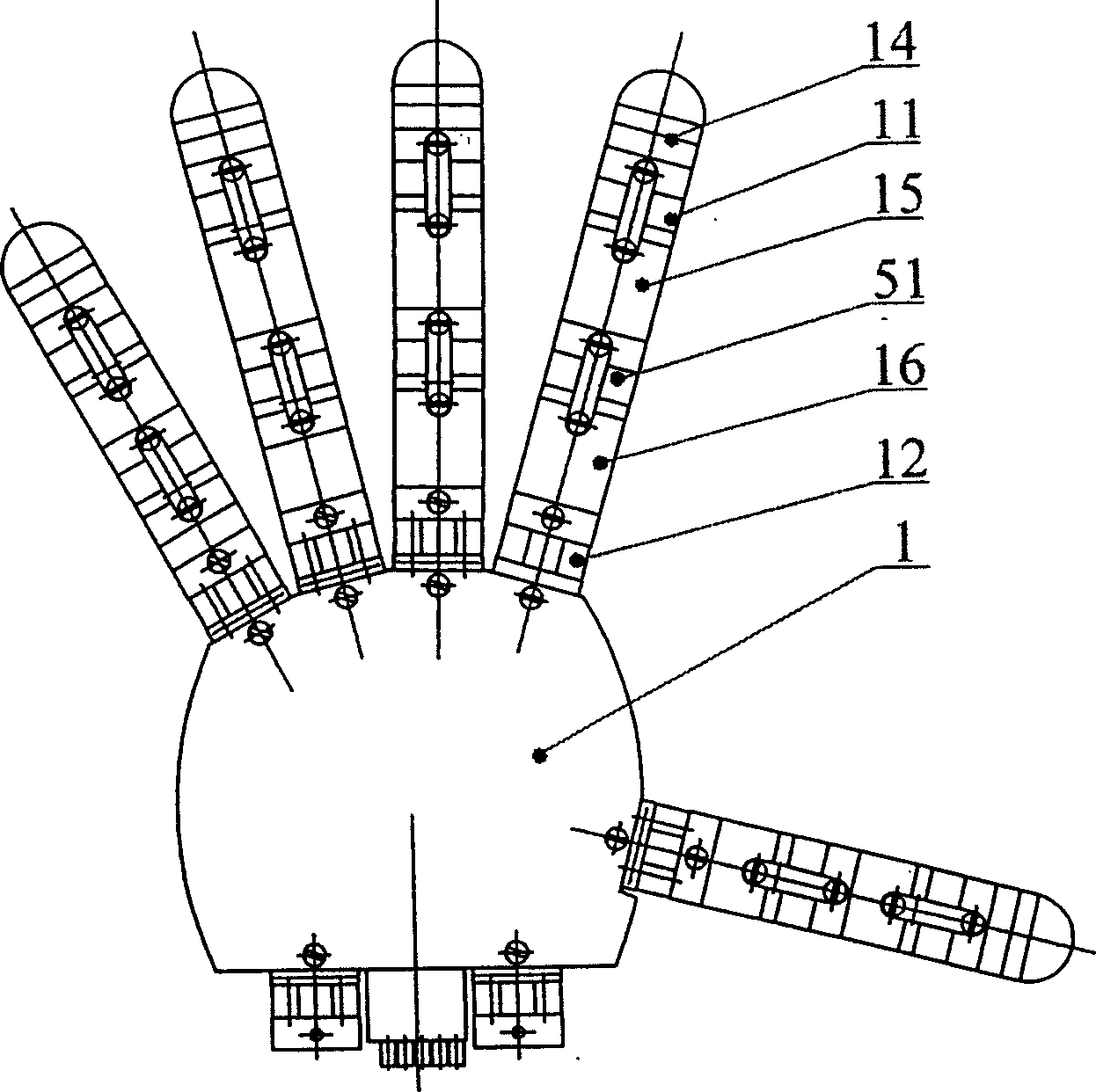
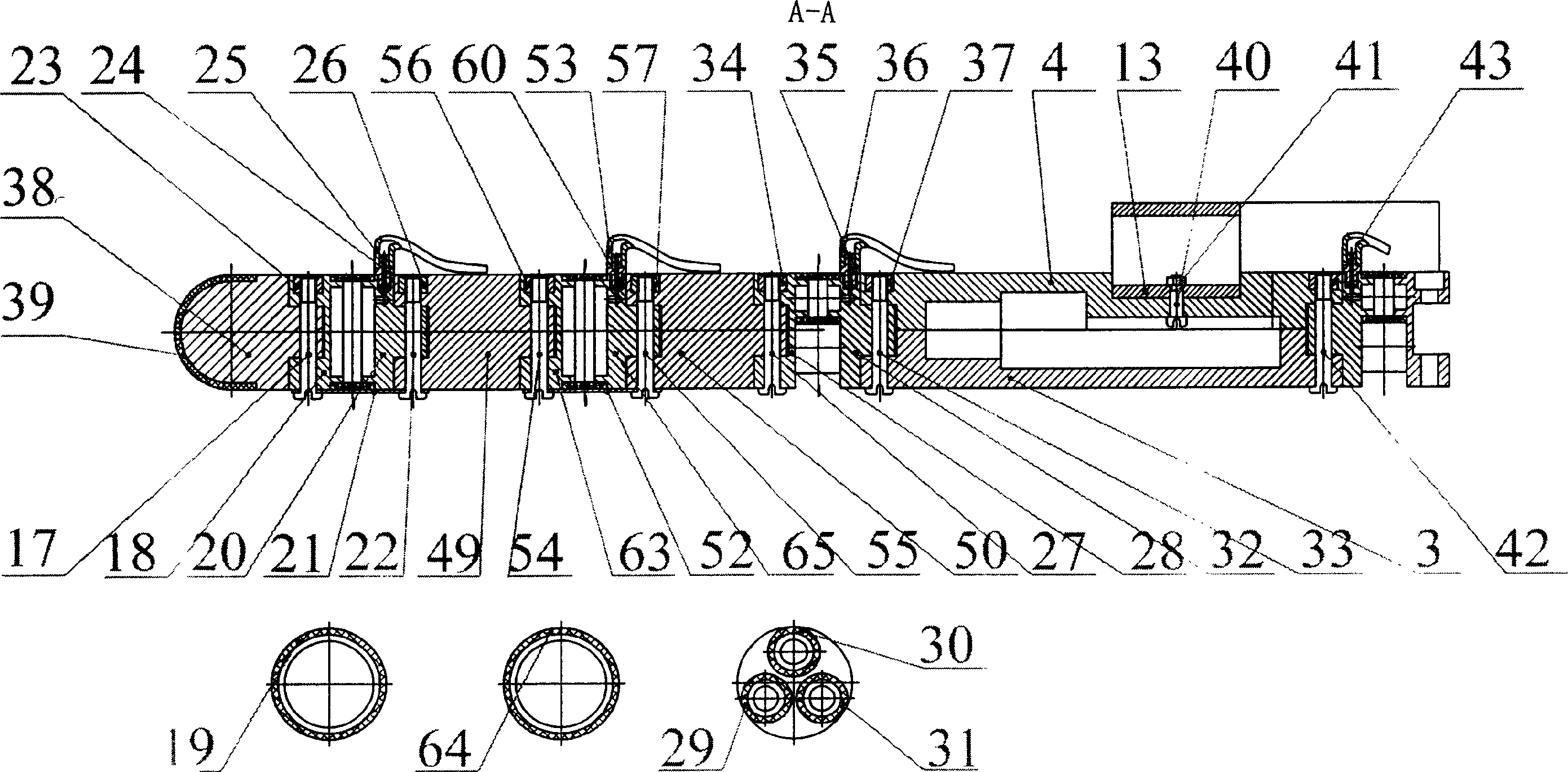
[0027] Such as figure 1 , 2 Shown, the present invention is made up of a palm 1, five fingers and wrist interface 2; Finger and wrist interface 2 are all connected on the mechanical interface 5 that palm 3 and back of hand 4 are combined; Five fingers are thumb 6, forefinger respectively 7. The middle finger 8, the ring finger 9 and the little finger 10, wherein the adjacent angles between the index finger 7, the middle finger 8, the ring finger 9 and the little finger 10 are all 15°, and the adjacent angle between the thumb 6 and the index finger 7 is 88°. Interfering motion of the fingers, each finger has three joints and four degrees of freedom. The wrist interface 2 is used to connect the palm 1 and the end of the robot manipulator to form a wrist joint with two degrees of freedom. Two pneumatic bending joints 11, 51 and a pneumatic ball joint 12 are dri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com