Human Shaped robot foot and foot force information detecting method
A robot foot and humanoid technology, applied in manipulators, manufacturing tools, etc., can solve problems such as calculation errors, model inaccuracy errors, sensor structures, and measuring ranges that cannot meet the requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
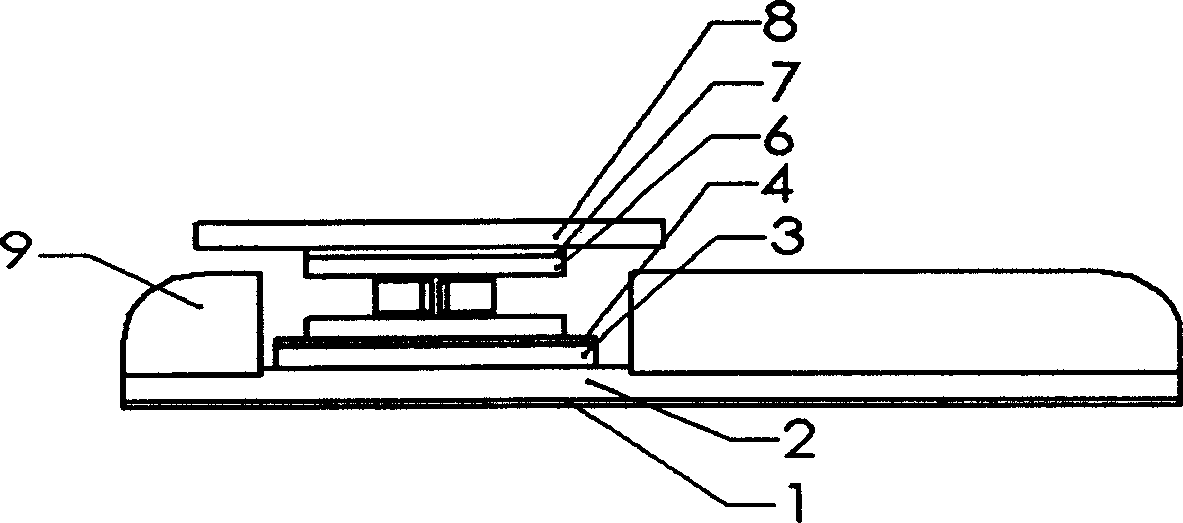
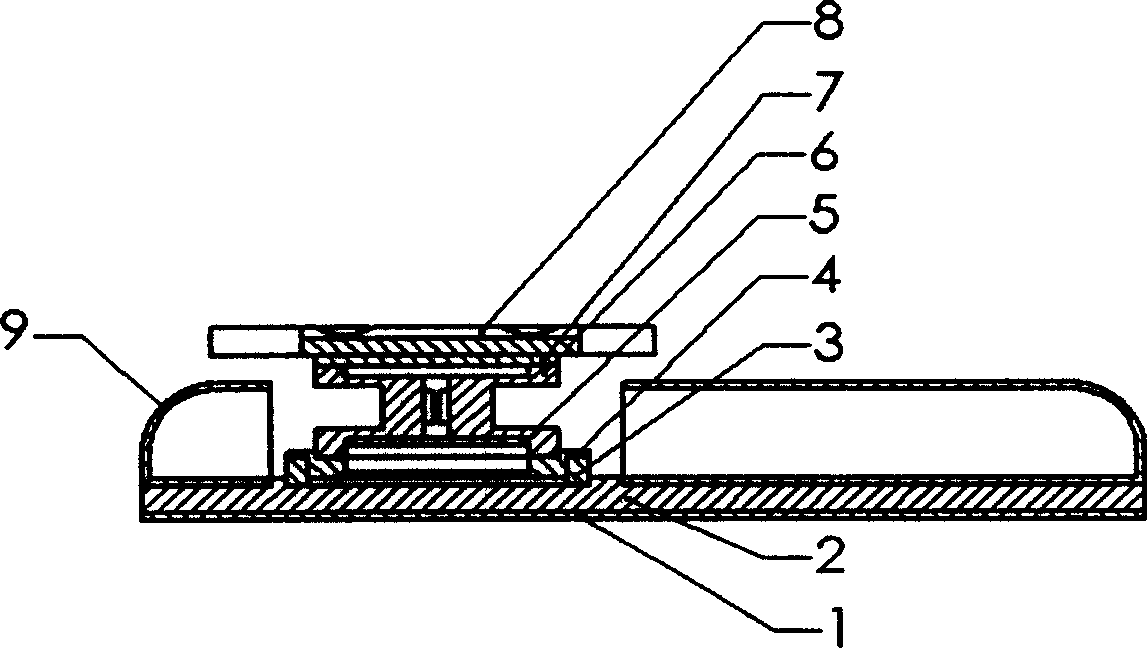
[0047] figure 1 It is the appearance diagram of the foot of the humanoid robot of the present invention, figure 2 It is a schematic diagram of a humanoid robot foot section, which includes a rubber foot layer 1, a foot plate 2, a rubber gasket ring 3, a lower flange 4, a signal processing circuit 5, a six-component force sensor 6, an upper flange 7, an adapter plate 8 and a foot surface 9 .
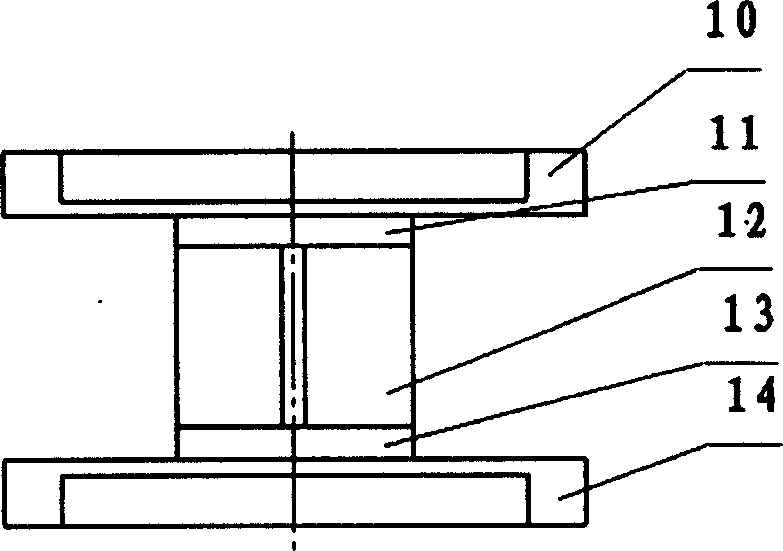
[0048] image 3 It is a schematic diagram of the structure of the foot six-component force sensor, wherein the upper circular diaphragm 10 and the lower circular diaphragm 14 adopt a circular diaphragm structure with a hard center, and the hard center 11 of the upper circular diaphragm 10 and the lower circular diaphragm 14 are connected to the upper circular diaphragm 14. The flange 7 and the lower flange 4 are matched with shaft holes to ensure the transmission of the axis in the Z direction of the coordinate system. Indicates the reference mark lines perpendicular to each other in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com