Robot system for micro-operation used for bio-medical engineering
A robotic system and biomedical technology, applied in the field of robotic system devices and micro-manipulation robot systems, can solve the problems of difficulty in ensuring accuracy, micro-manipulation tools are easily collided and broken, and no automatic obstacle avoidance function, etc. Product cost reduction effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
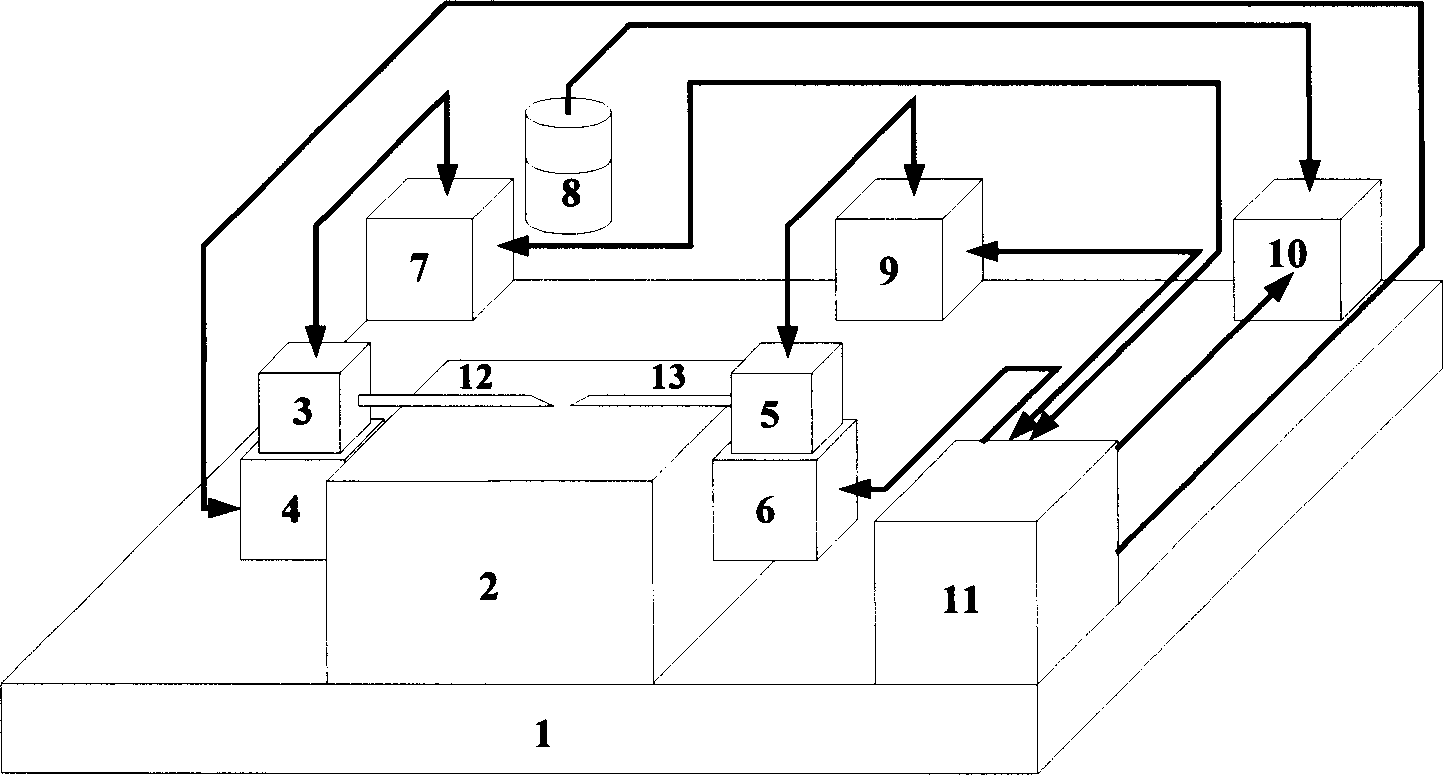
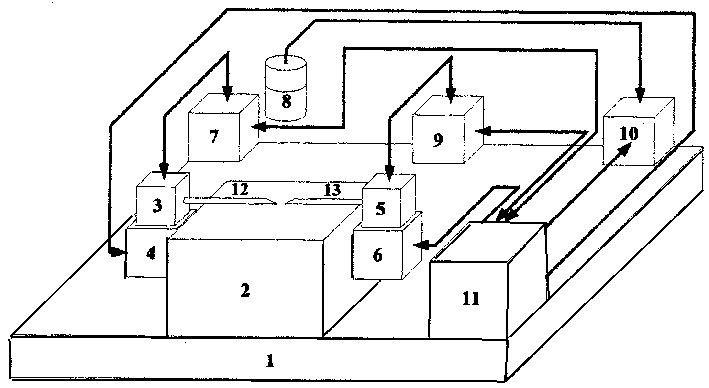
[0018] See figure 1 Shown, a kind of biomedicine-oriented micro-manipulation robot system of the present invention comprises microscope 2, left micro-manipulation hand 3, right micro-manipulation hand 5, left manipulation tool 12 (micro-pipette), right manipulation tool 13 (microinjection needle) , left hand servo controller 7, right hand servo controller 9, camera 8, image processing card 10, computer 11, cell adsorption device 4, gene injection device 6, vibration isolation platform 1, etc. It can complete cell cutting, fusion, injection, chromosome cutting, picking and other micro operations.
[0019] The left and right operating tools 12, 13 are installed on the left and right micro-manipulators 3, 5 respectively, the left micro-manipulators 3, 5 are three-degree-of-freedom rectangular coordinate motion platforms driven by micro-DC servo linear mot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com