3D printing mechanical arm for intelligent construction and use method of 3D printing mechanical arm
A technology for printing machinery and mechanical arms, applied in the field of manipulators, can solve problems such as affecting the progress of 3D printing and cumbersome operations, and achieve the effect of improving printing progress and convenient operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
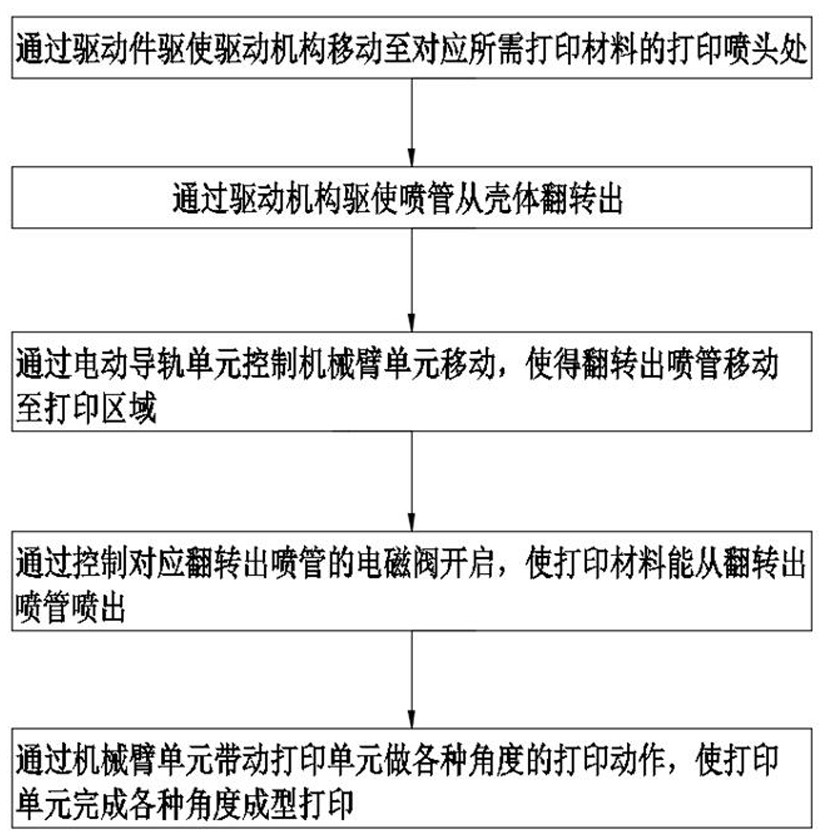
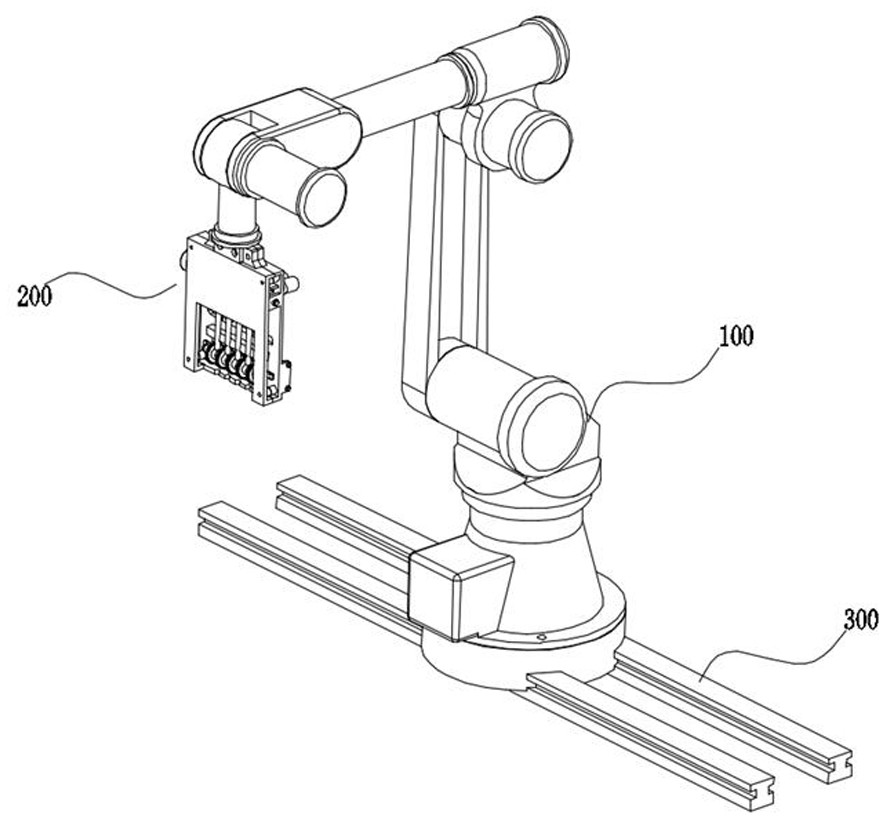
[0043] A 3D printing robotic arm for intelligent construction and a method of using the same in this embodiment, refer to Figure 2-12 : includes a robotic arm unit 100, and the arm end of the robotic arm unit 100 is provided with a printing unit 200; wherein, the robotic arm unit 100 specifically selects a 6-axis robotic arm.
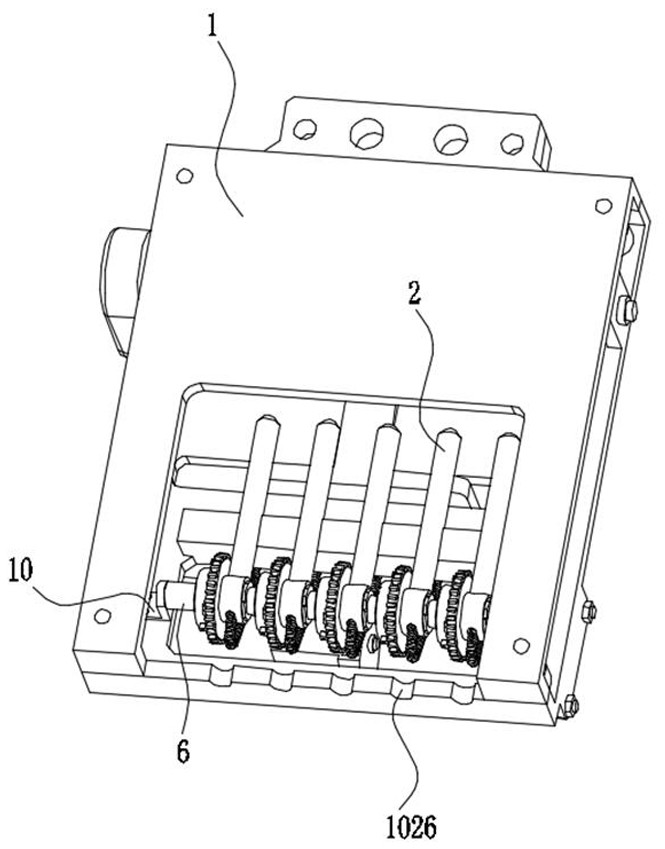
[0044] The printing unit 200 includes a casing 1 and multiple groups of printing nozzles 2, and the multiple groups of printing nozzles 2 are rotatably connected in the casing 1, wherein the printing nozzles 2 include nozzles 201, and each nozzle 201 corresponds to different printing materials. 200 also includes sliding on the outside of the bottom of housing 1 (to image 3 For the reference direction, the same below) the driving mechanism 3 and the driving member arranged in the casing 1 and driving the driving mechanism 3 to move left and right, the driving mechanism 3 can drive the nozzle 201 to turn out of the housing 1 or turn the nozzle 201 back....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com