Power line dangerous point prediction method and device based on unmanned aerial vehicle laser radar detection
A technology of laser radar and prediction method, which is applied in measurement devices, radio wave measurement systems, and re-radiation of electromagnetic waves.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
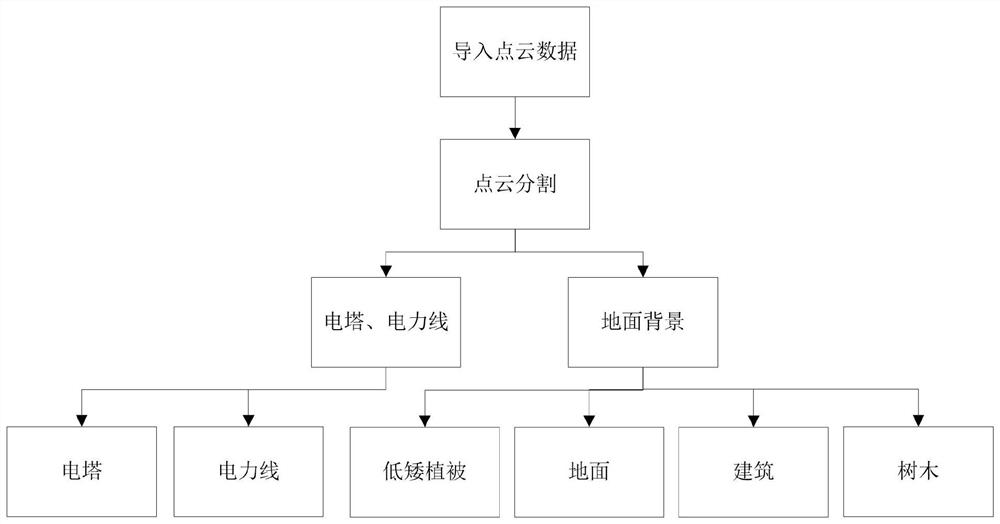
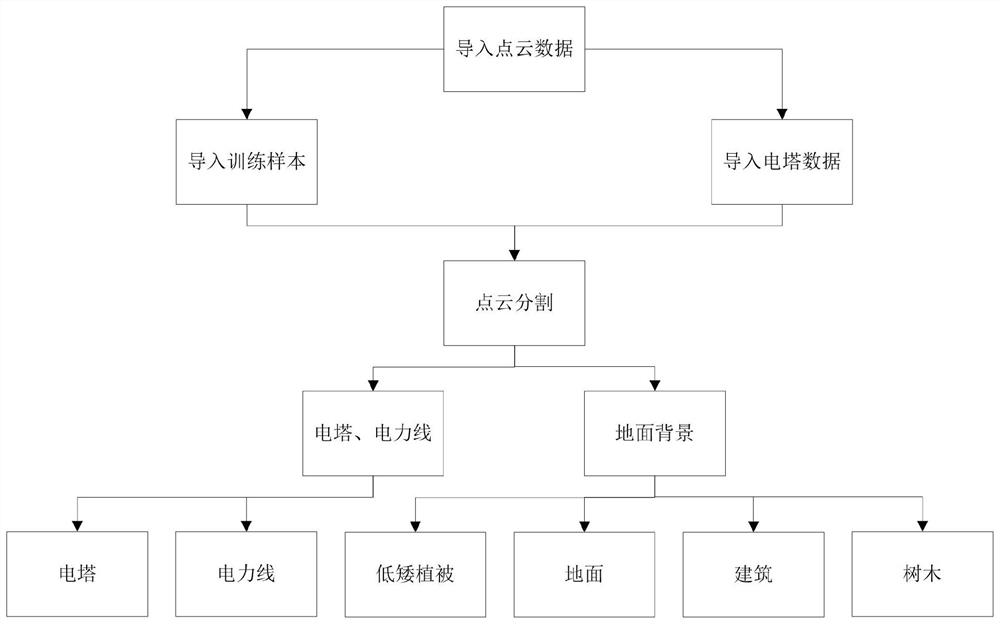
[0052] This embodiment discloses a power line danger point prediction method based on UAV lidar detection, the method includes:
[0053] The feature points are segmented for the power grid environment point cloud data collected by the UAV equipped with lidar, and the ground feature point data, power line point cloud data and obstacle candidate point data are obtained. The surface construction rule processes the obstacle candidate point data to obtain the surface position information of the obstacle candidate point. Using the distance between the power line position information and the surface position information of the obstacle candidate point, the prediction result of the power line danger point is obtained.
[0054] As an optional implementation manner, in the first embodiment of the present invention, the feature points are divided into the power grid environment point cloud data collected by the UAV mounted lidar to obtain the ground feature point data, power line point cl...
Embodiment 2
[0100] This embodiment discloses a power line danger point prediction device based on UAV lidar detection, including:
[0101] The feature point segmentation module is used to segment the feature points of the power grid environment point cloud data collected by the UAV equipped with lidar to obtain the ground feature point data, power line point cloud data and obstacle candidate point data; the location information building module is used for Fit the power line point cloud data to obtain the power line position information, and use the surface construction rules to process the obstacle candidate point data to obtain the surface position information of the obstacle candidate point; the prediction module uses the power line position information and the surface position of the obstacle candidate point. The distance between the position information, the prediction result of the dangerous point of the power line is obtained.
[0102] As an optional implementation manner, in the se...
Embodiment 3
[0147] This embodiment discloses another power line danger point prediction device based on UAV lidar detection, the device includes:
[0148] memory in which executable program code is stored;
[0149] a processor coupled to the memory;
[0150] The processor invokes the executable program code stored in the memory to execute part or all of the steps in the method for predicting a power line danger point based on UAV lidar detection disclosed in Embodiment 1 of the present invention.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com