Unmanned multi-laser radar collaborative simulation method based on GPU acceleration
A co-simulation and unmanned driving technology, applied in the direction of constraint-based CAD, design optimization/simulation, instruments, etc., can solve the problems of low efficiency of lidar simulation and lidar co-simulation, and achieve efficient utilization and high-efficiency simulation. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
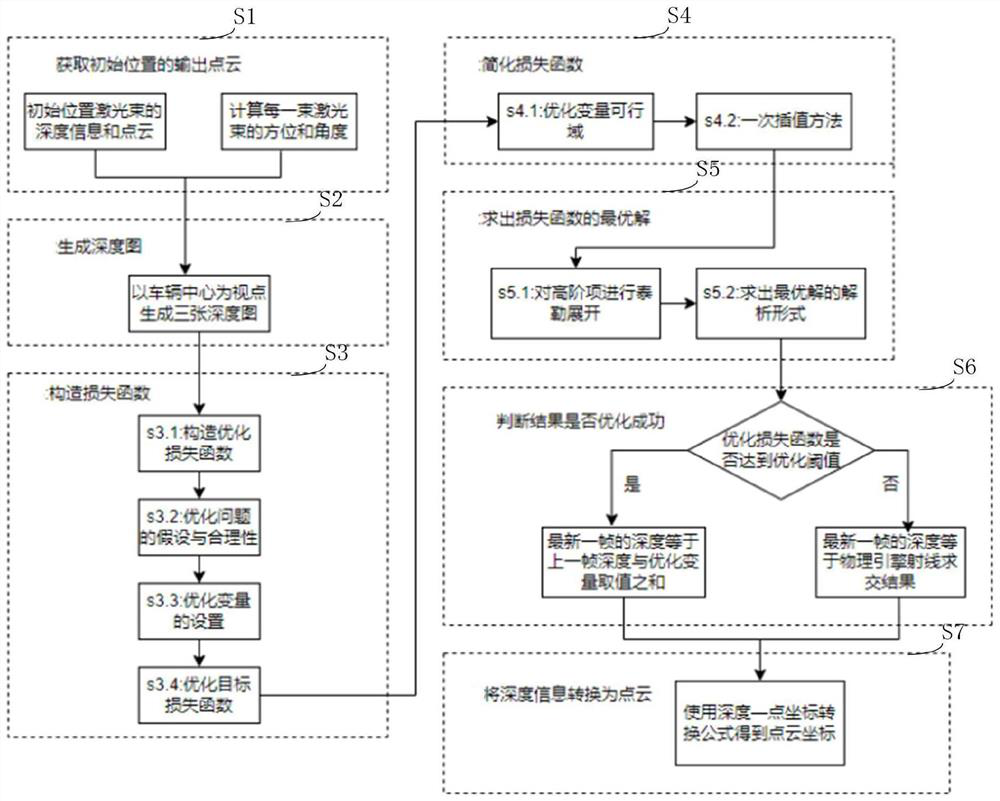
[0022] In order to make the technical means, creative features, goals and effects of the present invention easy to understand, the following embodiments will specifically illustrate a GPU-accelerated multi-lidar co-simulation method of the present invention in conjunction with the accompanying drawings.
[0023] In this embodiment, a multi-lidar co-simulation method based on GPU acceleration is provided.
[0024] First, the coordinate system used in this embodiment is described: this embodiment adopts a left-handed coordinate system for symbolic representation, the X-axis represents the front-to-back direction and the positive direction is forward, the Y-axis represents the left-right direction and the positive direction is rightward, and the Z-axis Represents the up and down direction and the positive direction is down. And use Euler angles (pitch, yaw, roll) to represent the direction of the vector. The pitch angle pitch represents the angle in the vertical direction, that ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com