Obstacle trajectory prediction method and device, electronic equipment and storage medium
A trajectory prediction and obstacle technology, applied in the field of vehicles, can solve the problems of not considering the relationship between obstacles and lanes, poor prediction accuracy, unreasonable prediction results, etc., to achieve the effect of improving accuracy and interpretability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
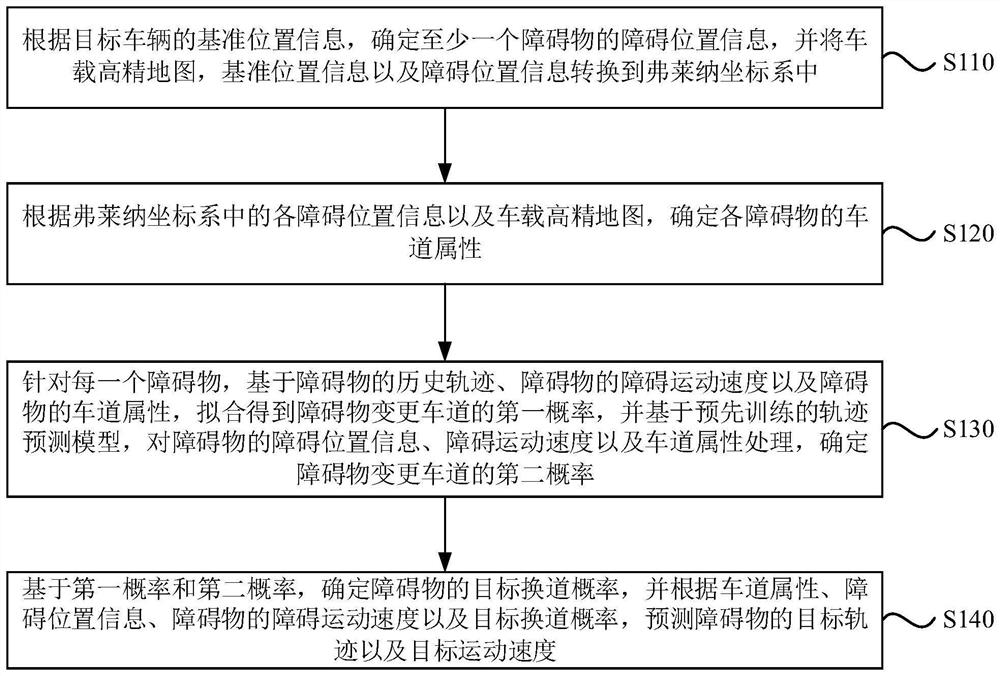
[0030] figure 1 It is a schematic flowchart of a method for predicting obstacle trajectories provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation where the future trajectories of surrounding obstacles are predicted during vehicle driving. The trajectory prediction device can be implemented by means of software and / or hardware, and the hardware can be electronic equipment. Optionally, the electronic equipment can be a mobile terminal, a vehicle-mounted terminal, and the like.
[0031] Such as figure 1 As described, the method of this embodiment specifically includes the following steps:
[0032] S110. Determine the obstacle location information of at least one obstacle according to the reference location information of the target vehicle, and convert the vehicle-mounted high-precision map, the reference location information, and the obstacle location information into a Fleiner coordinate system.
[0033] Wherein, the target vehicle...
Embodiment 2
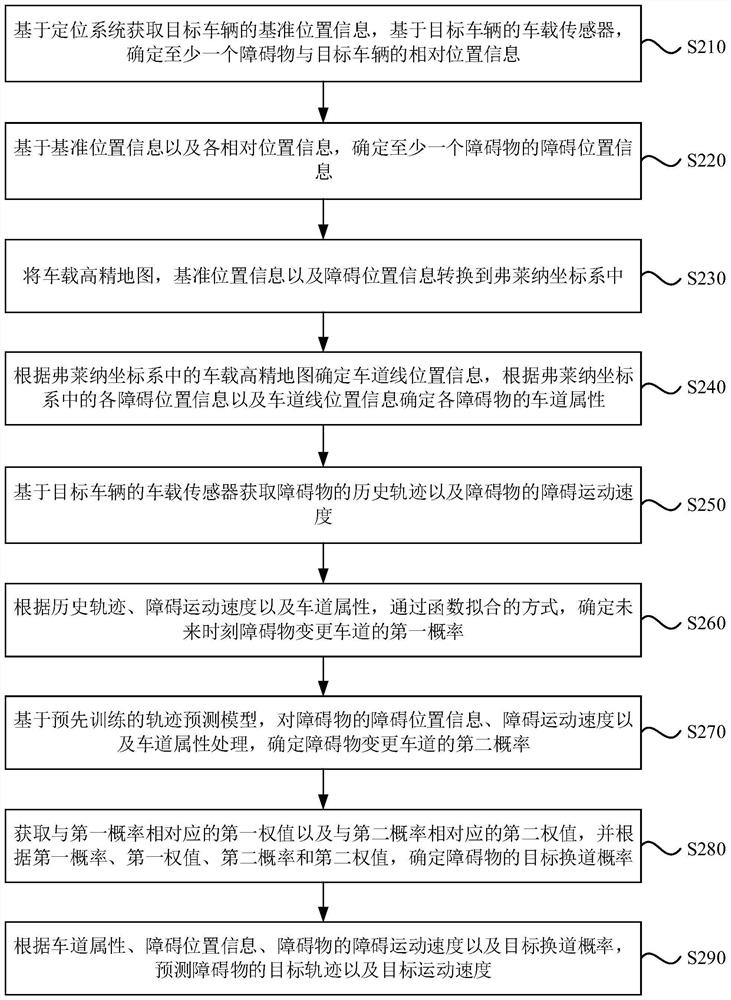
[0046] figure 2 It is a schematic flowchart of an obstacle track prediction method provided by Embodiment 2 of the present invention. On the basis of the above-mentioned embodiments, this embodiment focuses on the determination method of obstacle position information, the determination method of obstacle lane attributes, the second For the method of determining a probability and the method of determining the target lane-changing probability, refer to the technical solution of this embodiment. Wherein, explanations of terms that are the same as or corresponding to the above embodiments are not repeated here.
[0047] Such as figure 2 As described, the method of this embodiment specifically includes the following steps:
[0048] S210. Acquire the reference position information of the target vehicle based on the positioning system, and determine the relative position information of at least one obstacle and the target vehicle based on the vehicle-mounted sensor of the target ...
Embodiment 3
[0129] Figure 5 It is a schematic structural diagram of an obstacle trajectory prediction device provided in Embodiment 3 of the present invention, which includes: a coordinate conversion module 310 , a lane attribute determination module 320 , a probability determination module 330 and a prediction module 340 .
[0130] Wherein, the coordinate conversion module 310 is used to determine the obstacle position information of at least one obstacle according to the reference position information of the target vehicle, and convert the vehicle-mounted high-precision map, the reference position information and the obstacle position information to Freiner In the coordinate system; the lane attribute determination module 320 is used to determine the lane attributes of each obstacle according to the obstacle position information in the Fleiner coordinate system and the vehicle-mounted high-precision map; the probability determination module 330 is used for each Obstacles, based on the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com