Multi-point motion track planning method for mechanical arm
A motion trajectory, robotic arm technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of cumbersome calculation, unsmooth and stable control of manipulators, etc., to achieve smooth motion process, short calculation time, and stable acceleration. continuous effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
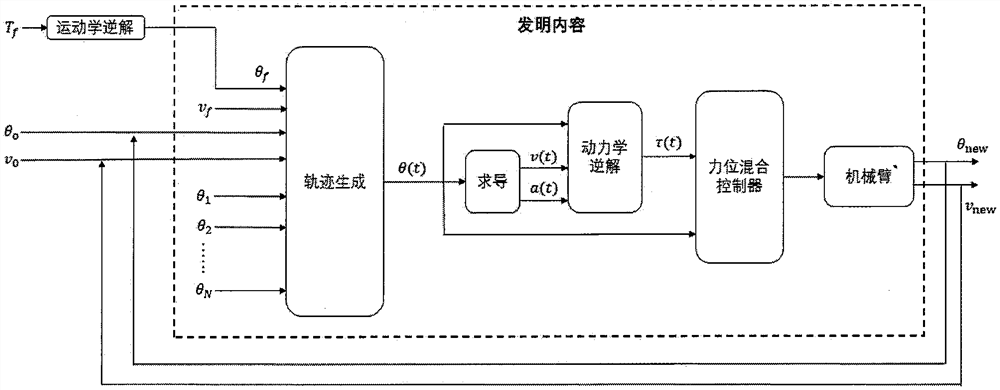
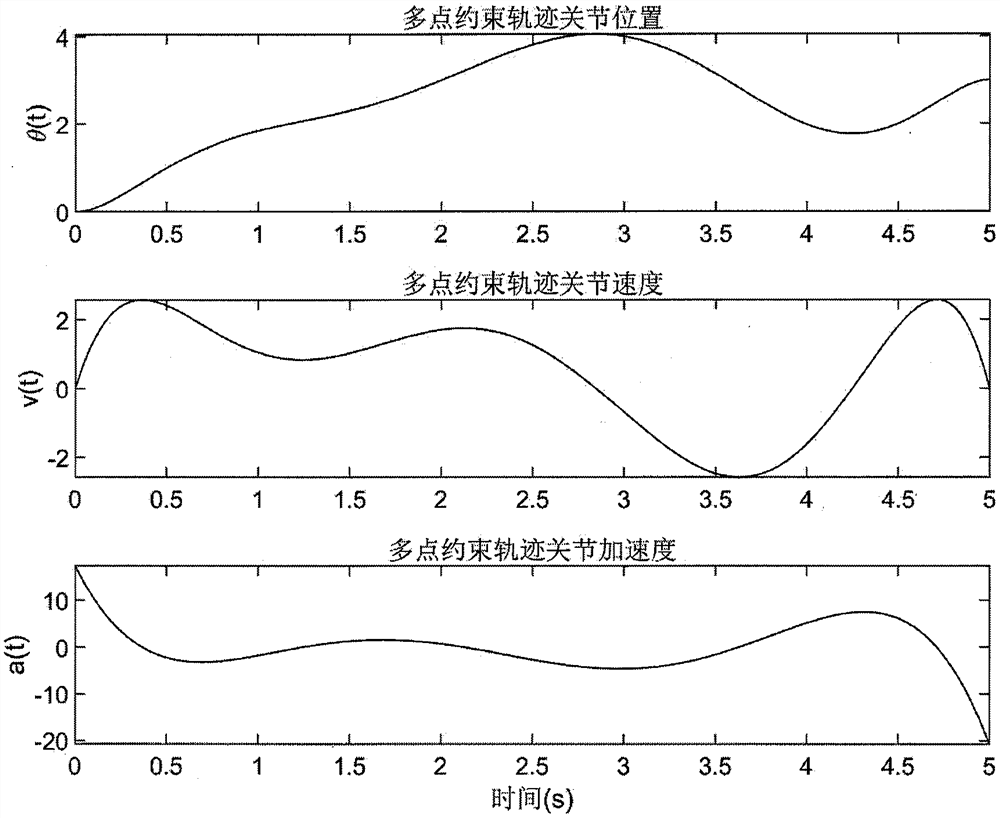
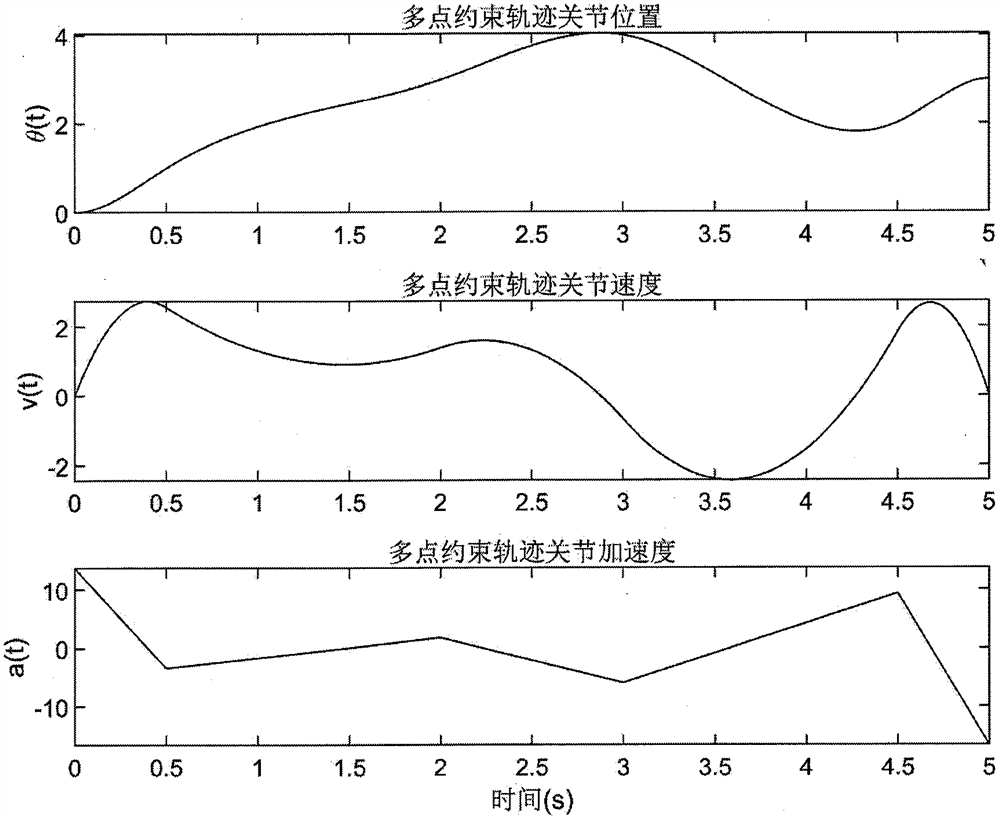
[0078] Taking the manipulatory arm single joint trajectory as an example, set the initial state of the robot arm, that is, when T 0 = 0, its location information θ 0 = 0, its speed information V 0 = 0; set the termination state of the robot arm, ie when T f = 5S, its location information θ f = 3, its speed information V f = 0;
[0079] Set the middle path point parameters of the robot arm, set the number of path points n = 4; and set the time information of 4 path points T = [T 1 , T 2 , T 3 , T 4 ] = [0.5, 2, 3, 4.5] (s) and location information θ = [θ 1 , Θ 2 , Θ 3 , Θ 4 ] = [1, 3, 4, 2];
[0080] Receive 7 multiplicated equations according to step 2:
[0081] θ (t) = a 0 + a 1 T + a 2 t 2 + a 3 t 3 + a 4 t 4 + a 5 t 5 + a 6 t 6 + a 7 t 7 ;
[0082] The 8-yuan linear equation group is listed according to the setting input parameters:
[0083] θ (0) = 0
[0084] θ (0.5) = 1
[0085] θ (2) = 3
[0086] θ (3) = 4
[0087] θ (4.5) = 2
[0088] θ (5) = 3
[0089] θ '(0) = 0
[0090] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com