Corrugated double-inner-cavity gas-powered flexible micro finger, control method and grabbing system
A flexible finger and corrugated technology, which is applied in the field of corrugated double-cavity air-driven flexible micro-fingers, control and grasping systems, can solve the problem of difficult control of finger output force and joint position, and it is difficult to realize the function of miniature flexible hands. Unify the mathematical model and other issues to achieve the effect of simplifying the position control method, low noise and smooth movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention is described in detail below in conjunction with accompanying drawing:
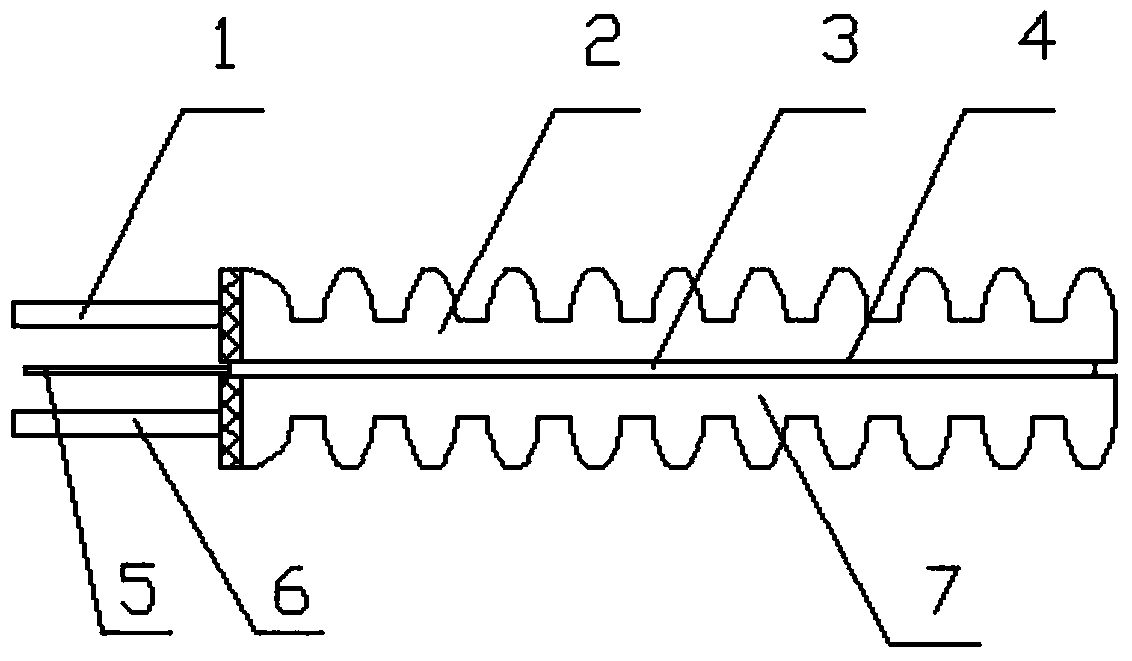
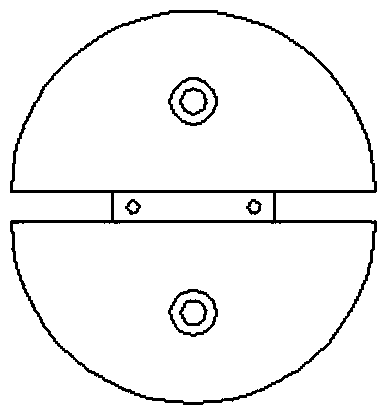
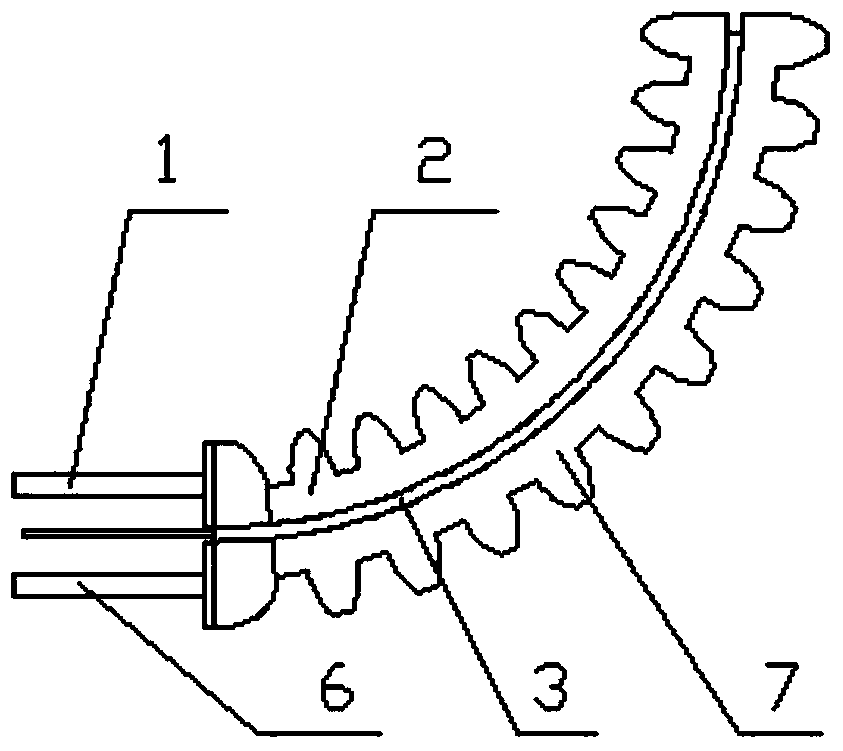
[0045] The present invention mainly consists of the following components, as shown in the figure: a double-chamber miniature air-driven flexible miniature finger composed of two symmetrically arranged single-half corrugated hollow rubber tube half-fingers I2, II7, between the two half-fingers There is a sheet-type bending inclination sensor 3 in contact with it, and two and a half fingers are respectively provided with a gas inlet and outlet I1, II6 or 1 inlet and 1 outlet separately; the pneumatic Single corrugated hollow rubber tube half-finger, its top surface is a corrugated wrinkled surface, its bottom surface is a horizontal surface, and the top surface and bottom surface are integrated to form a hollow cavity, in which the outer side of the inner cavity is transversely corrugated, which is hollow semi-cyclic structure.
[0046] The sheet type bending inclination sensor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com