High-speed AUV motion control method
A motion control and high-speed technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of sensitive changes in environmental parameters, difficult to obtain accurate models, difficult to determine the number of network layers, etc., to achieve the suppression of internal and external The influence of disturbance, the effect of improving work performance and ensuring control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
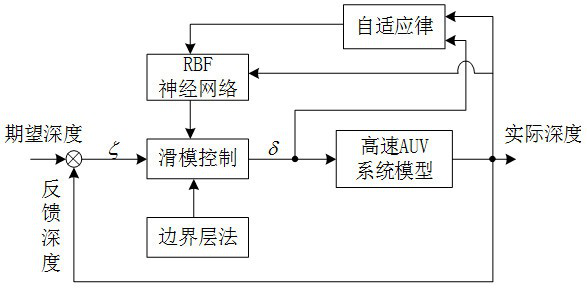
[0029] The present invention will be further described below in conjunction with drawings and embodiments. The invention provides a high-speed AUV motion control method, which specifically includes the following steps:
[0030] (1) The functional relationship between the system parameters and the speed is obtained by polynomial fitting, and the simplified motion model of the high-speed AUV is obtained according to the functional relationship; the speed is used as the input of the simplified motion model of the high-speed AUV. Specifically:
[0031] figure 1 It is a schematic diagram of the high-speed AUV inertial coordinate system and the carrier coordinate system, and the dynamic model of the high-speed AUV is simplified. Depth control of high-speed AUV at different speeds, when AUV maneuvers according to depth, assume longitudinal speed Provided by the thrust system alone and can be maintained at a stable value, the longitudinal velocity can be set is a constant, ignor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com