


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Electric steering engine simulation modeling method based on parameter identification
A technology of electric steering gear and simulation modeling, which is applied in the field of servo control of aircraft to achieve fast iteration speed, short set-up cycle, and time-saving effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0037] A simulation modeling method for electric steering gear based on parameter identification, comprising the following steps:
[0038] Step 1, utilize Laplace transformation, establish the preliminary simulation model of electric steering gear; Then carry out simulation to this preliminary simulation model, control algorithm is set as P control;
[0039] Step 2. For the actual electric steering gear, only P control is used to test the step signal and square wave to obtain the corresponding rise time Tr and overshoot σ;
[0040] Step 3. Take the rise time Tr and overshoot σ obtained from the test as the target value, set the value search range of the moment of inertia and friction coefficient of the electric steering gear, and obtain the calculated rise time Tr' and overshoot through simulation iterations σ', and then compare the calculation results of the simulation iteration with the target value obtained by the test, calculate the degree of deviation by using the princip...
Embodiment 2
[0050] A simulation modeling method for electric steering gear based on parameter identification, comprising the following steps:
[0051] Step 1. According to the voltage balance equation of the armature circuit of the electric steering gear and the torque balance equation on the motor shaft, a preliminary simulation model of the electric steering gear is established by using Laplace transformation;
[0052] Step 2. For the actual electric steering gear, use a certain control method to test the step signal and square wave to obtain the corresponding rise time Tr and overshoot σ;
[0053] Step 3. Take the rise time Tr and overshoot σ obtained from the test as the target value, set the value search range of the moment of inertia and friction coefficient of the electric steering gear, and iteratively obtain the simulated rise based on the preliminary simulation model of the electric steering gear. Time Tr', overshoot σ', and then compare the results of iterative simulation with ...
Embodiment 1 or Embodiment 2
[0062] Based on embodiment 1 or embodiment 2, a kind of electric steering gear simulation modeling method based on parameter identification comprises the following steps:
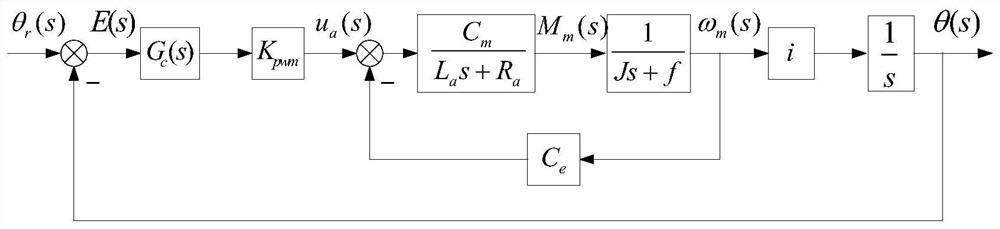
[0063] 1. According to the voltage balance equation of the armature circuit of the electric steering gear and the torque balance equation on the motor shaft Among them, u a (t) is the armature voltage, L a is the armature inductance, i a (t) is the armature current, R a is the armature resistance, E a is the back electromotive force, J is the moment of inertia, f is the friction coefficient, ω m (t) is the motor speed, M m (t) is the electromagnetic torque of the motor, M c (t) is load torque, and t is time. Through Laplace transform derivation, build a preliminary simulation model such as figure 1 Shown, where θ r (s) is the input command angle, E(s) is the error, G c (s) is the control law, K pwm is the power amplifier coefficient, u a (s) is the armature voltage, C m is the motor torque c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com