Ship rust removal robot based on high-pressure water jet and convenient to walk
A high-pressure water jet and robot technology, which can be used in ship hulls, ship construction, ship cleaning devices, etc., can solve problems such as no limit structure, environmental pollution, etc., to improve work efficiency, increase friction, and improve supporting effects. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
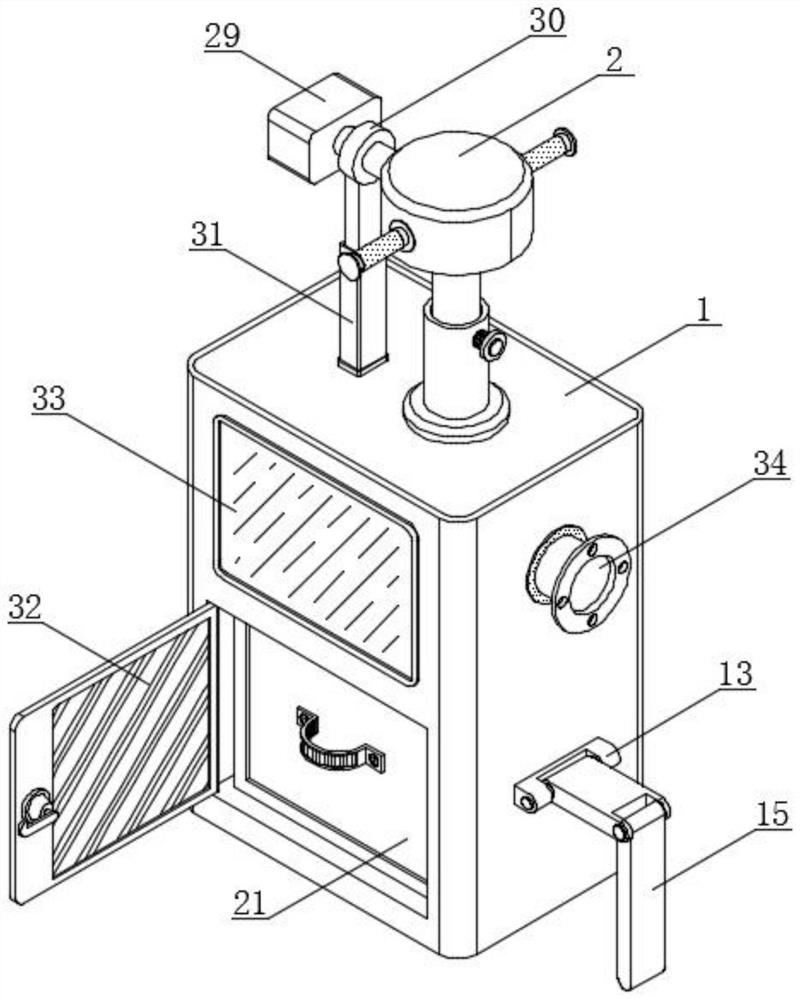
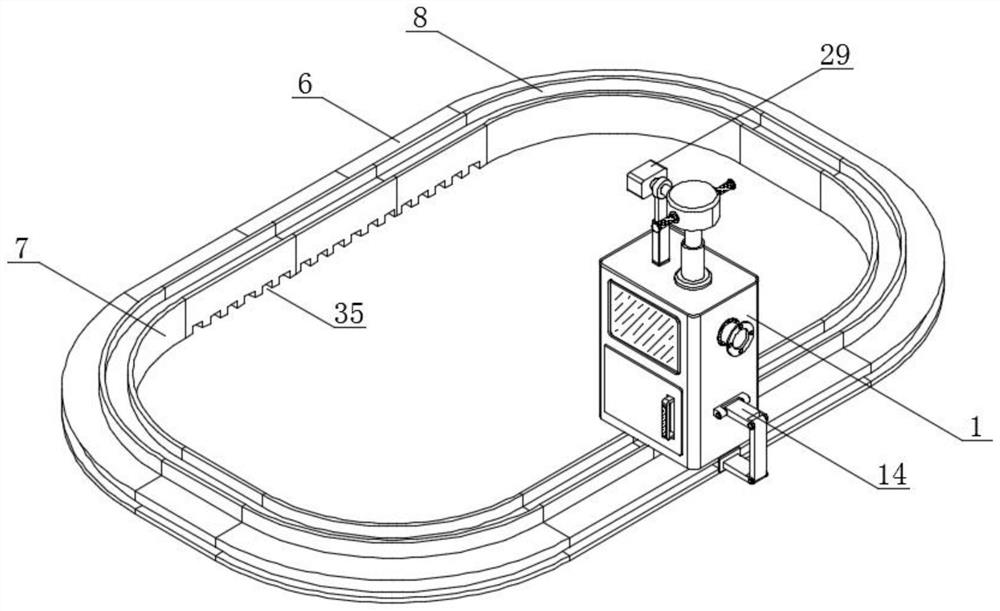
[0042] see Figure 1-8 , an embodiment provided by the present invention: a ship derusting robot based on high-pressure water jet and easy to walk, including a working box 1, a water storage box 2 and a mounting plate 3, and a water storage box 2 is arranged above the working box 1 , the bottom of the working box 1 is provided with a mounting plate 3; the middle part of both sides of the mounting plate 3 is equipped with a connecting card 4, the surface of the connecting card 4 is plugged with a connecting card slot 5, and the surface of the connecting card 4 passes through the connecting card. The groove 5 is inserted with an adapter plate 6, and the surface of the connecting card plate 4 and the inner wall of the connecting card groove 5 are provided with anti-slip lines, and one side of the mounting plate 3 and one side of the connecting plate 6 are connected with an arc-shaped plate 7. The tops of the plate 3, the connecting plate 6 and the arc-shaped plate 7 are all provi...
Embodiment 2
[0045] see Figure 1-8 , an embodiment provided by the present invention: a ship derusting robot based on high-pressure water jet and easy to walk, including a transmission rod 14, a movable rod 15 and a connecting clip 12, a mounting plate 3, an connecting plate 6 and an arc plate 7 Limit chute 10 is installed on the bottom of the surface, the inside of limit chute 10 is slidingly connected with limit slider 11, the middle part of limit slider 11 surface is equipped with connecting clip 12, and the middle part of work box 1 side is installed with movable Clip 13, the inside of movable clip 13 is connected with transmission rod 14, and the top of transmission rod 14 is connected with movable rod 15, and the intersection of transmission rod 14 and movable folder 13 and the intersection of transmission rod 14 and movable rod 15 are all provided with Rotating shaft, and the bottom end of movable rod 15 is connected to the inside of connecting clamp 12, and the middle part of work...
Embodiment 3
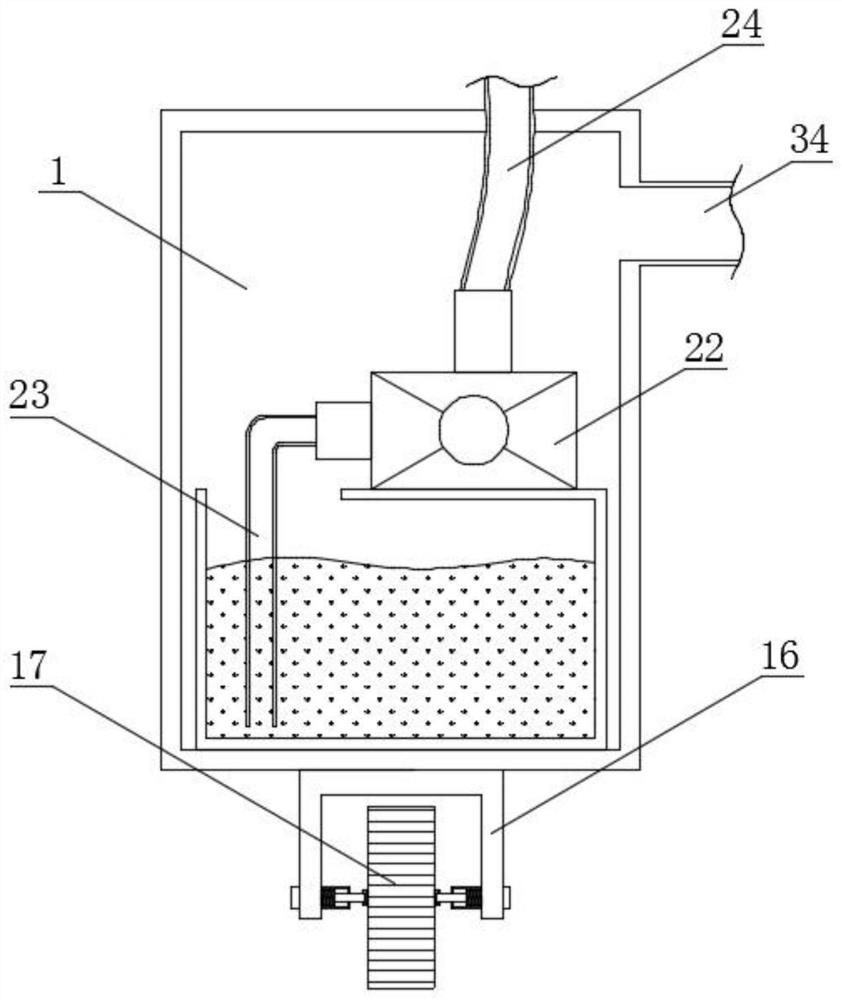
[0048] see Figure 1-8 , an embodiment provided by the present invention: a ship derusting robot based on high-pressure water jets and easy to walk, including a water storage box 2, the inner bottom wall of the working box 1 is provided with a water collection tank 21, a water collection tank 21 top The side is provided with a water pump 22, the input end of the water pump 22 is connected with a water inlet pipe 23, and the water inlet pipe 23 is located inside the sump 21, and the output end of the water pump 22 is connected to the bottom inside the water storage box 2 through the water outlet pipe 24, and the water storage box 2 An adjustment rod 25 is installed in the middle of the bottom, and the bottom end of the surface of the adjustment rod 25 is connected with a support sleeve 26, and the outlet pipe 24 is located inside the adjustment rod 25 and the support sleeve 26, and the intersection of the adjustment rod 25 and the support sleeve 26 A tightening knob is threaded...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com