Airborne/vehicle-mounted laser point cloud precision estimation method based on Monte Carlo simulation
A laser point cloud and vehicle-mounted laser technology, which is applied in the field of surveying and mapping science, can solve the problems of inaccurate estimation of laser point cloud positioning accuracy, and achieve the effect of major engineering application value, strong universality and wide application range.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
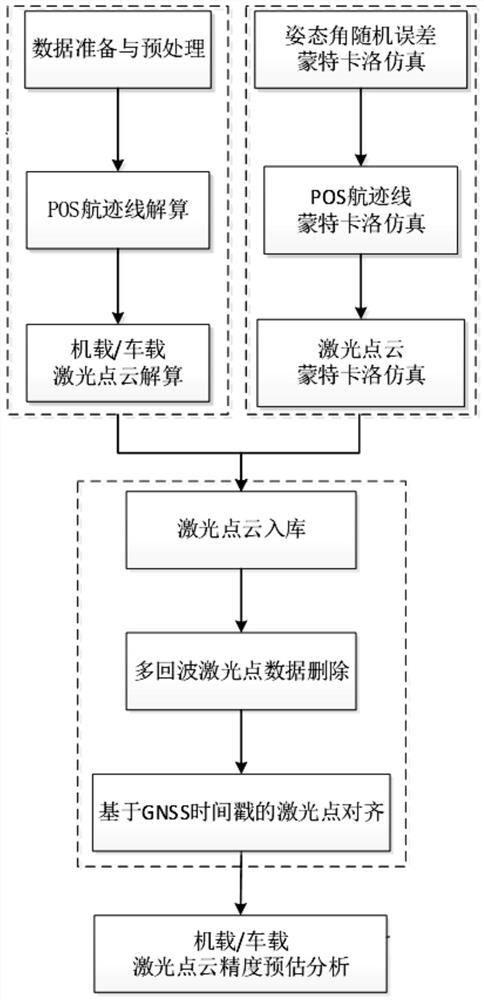
[0068] An airborne laser point cloud accuracy prediction method based on Monte Carlo simulation, the flow chart is as follows figure 1 shown. The data used in this embodiment is collected by the ARS-1000 airborne lidar system, and the original data mainly includes: ground GNSS reference station data, airborne GNSS data, laser ranging original data, etc.
[0069] Each step is described in detail as follows:
[0070] Step 1. Raw laser point cloud generation
[0071] Step 1.1, data preparation and preprocessing: export the rover data and laser ranging raw data from the airborne lidar equipment, and convert the ground GNSS reference station data into Rinex standard format.
[0072] Step 1.2, POS track line calculation: Carry out precise differential calculation (DGNSS) on the airborne GNSS observation data combined with the ground GNSS reference station data, and then calculate the center of the airborne GNSS antenna at each moment obtained by the precise differential calculatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com