Relative orbit and attitude tracking control method for final approaching section of rendezvous and docking of spacecrafts
A relative orbit, rendezvous and docking technology, applied in the direction of attitude control, non-electric variable control, control/regulation system, etc., can solve the problems of closed-loop system control performance degradation, system tracking error dependence on the initial value, and damage to system stability, etc. , to achieve the effect of strong engineering realization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
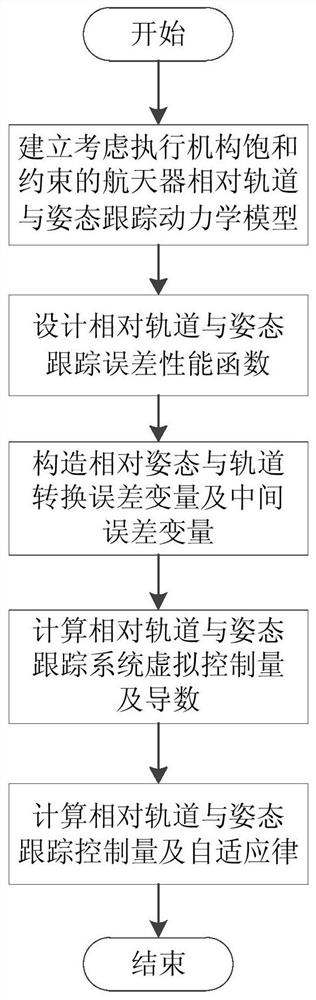
[0086] A relative orbit and attitude tracking control method for the final approach stage of spacecraft rendezvous and docking. By constructing a new performance function, the known restrictions on the initial tracking error are relaxed, and the design idea of preset performance is used to achieve both fine and stable states. As with transient control, the saturation constraints of the actuator are taken into account while considering the preset steady-state and transient performance.
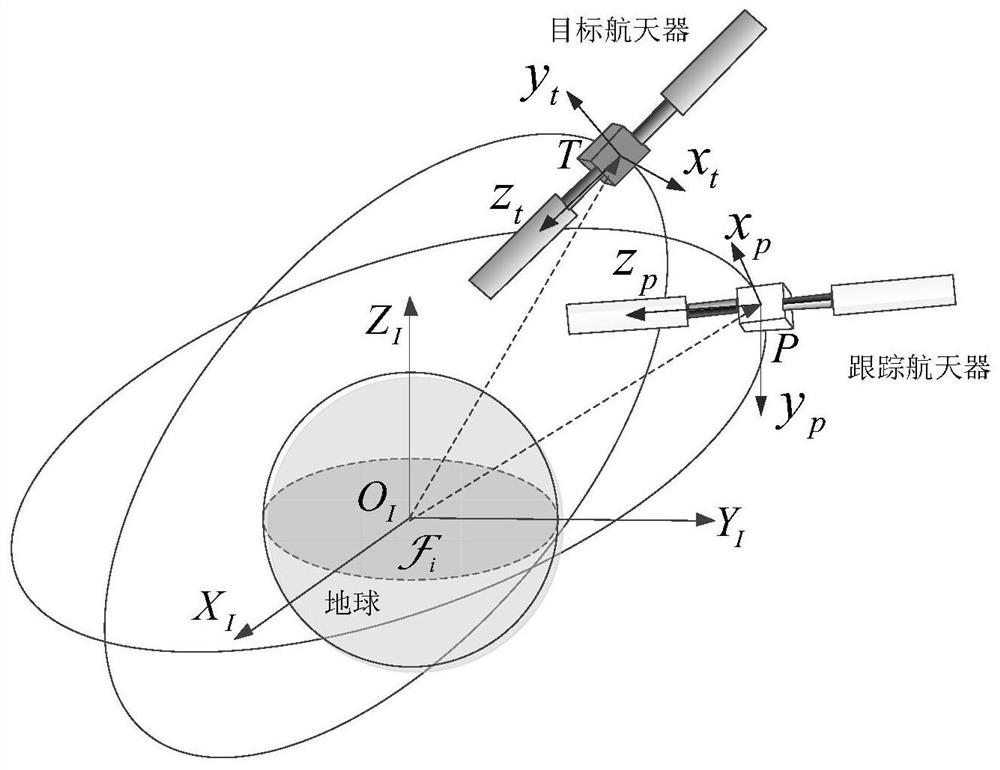
[0087] First, the relative orbit and attitude tracking dynamics and kinematics model between the tracking spacecraft and the target spacecraft in the final approach segment of the rendezvous and docking mission are established, taking into account the model uncertainty, external environmental interference, and actuator saturation constraints. Then, the performance boundaries that do not depend on the initial value are designed to constrain the relative orbit tracking error and relative attitud...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com