Robotic logistics handling system and method based on Bluetooth base station positioning and scheduling
A technology of logistics handling and handling system, applied in the field of logistics, can solve the problems of low scope of application and robots cannot cooperate in handling, etc., to achieve the effect of increasing the scope of application, improving stability and efficiency, and improving the accuracy of transportation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
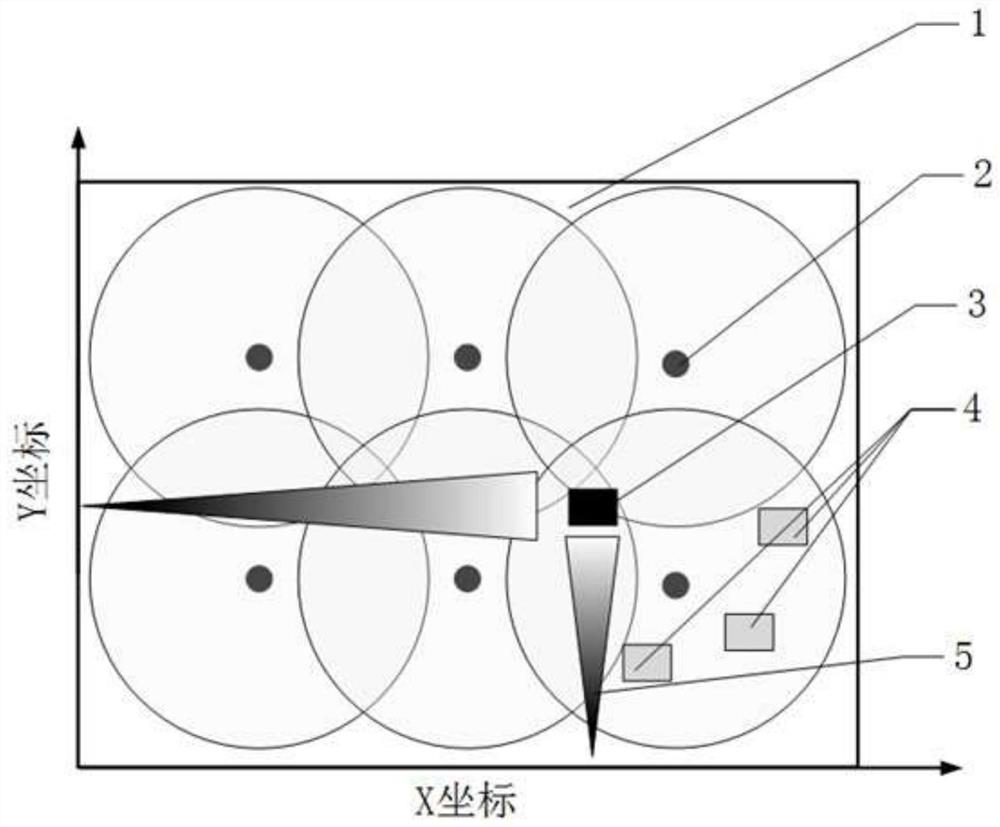
[0068] like figure 1 As shown, an embodiment of the present invention is a robot logistics handling system based on Bluetooth base station positioning and scheduling, including:
[0069] A number of sub-robots 4 located on the warehouse yard 1 for carrying the goods 3 to be carried;
[0070] Several Bluetooth base stations 2 for cooperating with the positioning sub-robot 4;
[0071] A vision positioning system 5 positioned around the warehouse yard 1 for locating the cargo 3 to be handled; and
[0072] Cloud server (not shown), the sub-robot 4 is connected in communication with the cloud server, and the cloud server controls the movement of the sub-robot 4; the Bluetooth base station 2 is in communication connection with the cloud server, and the cloud server is connected through the Bluetooth base station 2. Position the sub-robot 4; the visual positioning system 5 is in communication connection with the cloud server, and the cloud server receives the position information o...
Embodiment 2
[0086] like Figure 4 As shown, an embodiment of the present invention is a robot logistics handling method based on Bluetooth base station positioning and scheduling, using the robot logistics handling system based on Bluetooth base station positioning and scheduling described in Embodiment 1, including the following steps:
[0087] Step 1: The visual positioning system 5 preliminarily predicts the position of the goods 3 to be transported, and transmits the position data of the goods 3 to be transported to the cloud server; specifically, a distribution map of the goods to be transported 3 can be formed on the display of the cloud server;
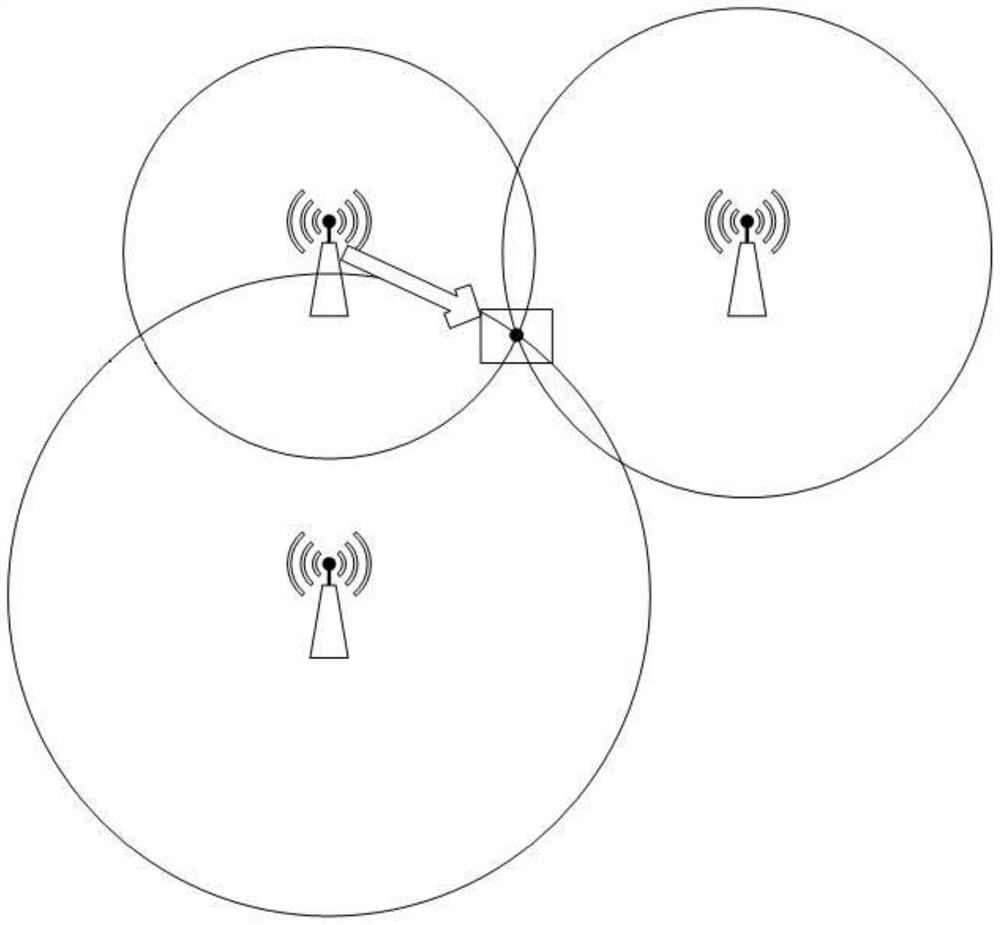
[0088] Step 2: The cloud server triangulates the coordinates of each sub-robot 4 through the Bluetooth base station 2, and forms a coordinate library of the sub-robots 4 in the cloud server; specifically, a distribution map of the sub-robots 4 can be formed on the display of the cloud server;
[0089] Specifically, as image 3 As shown, i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com