Underwater unmanned ship-double-mechanical-arm operation system-oriented dynamic coupling effect evaluation method
A dual manipulator, coupling effect technology, applied in underwater operation equipment, manipulators, program control manipulators, etc., can solve the problems of instability of the manipulator system, limited working space of small manipulators, and sharp increase in control difficulty. Achieve stable motion, improve system safety and maneuverability, and avoid coupling effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0042] In order to better understand the present invention, the technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
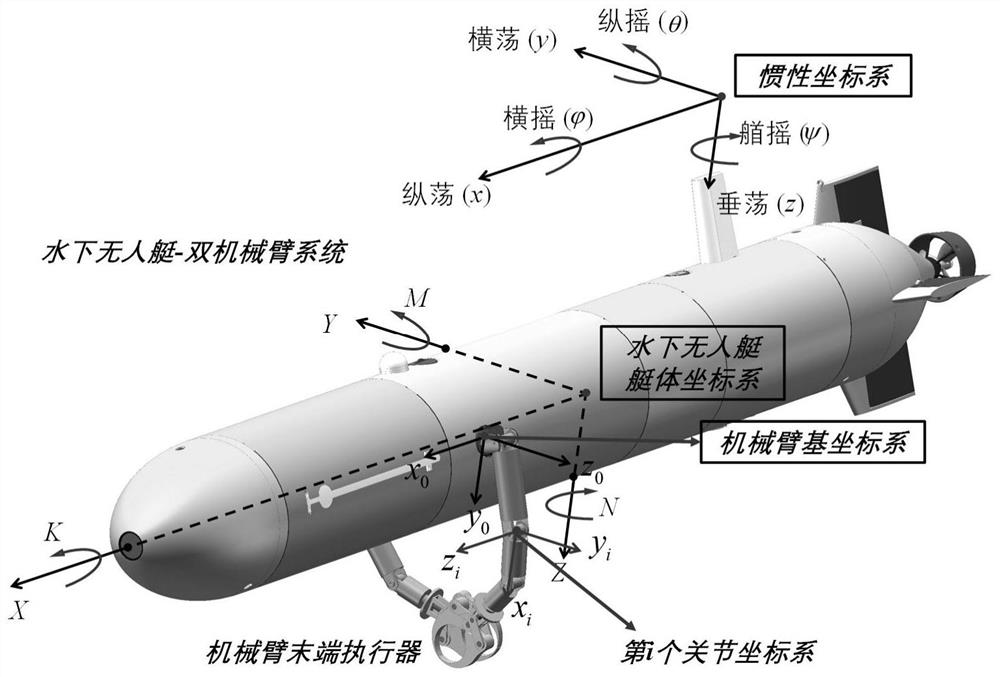
[0043] Such as figure 1 Shown is the schematic diagram of the underwater unmanned vehicle-dual robotic arm operation system. The specific parameters of the underwater dual robotic arm are shown in the table below.
[0044] Table 1 Dual robotic arm parameters
[0045]
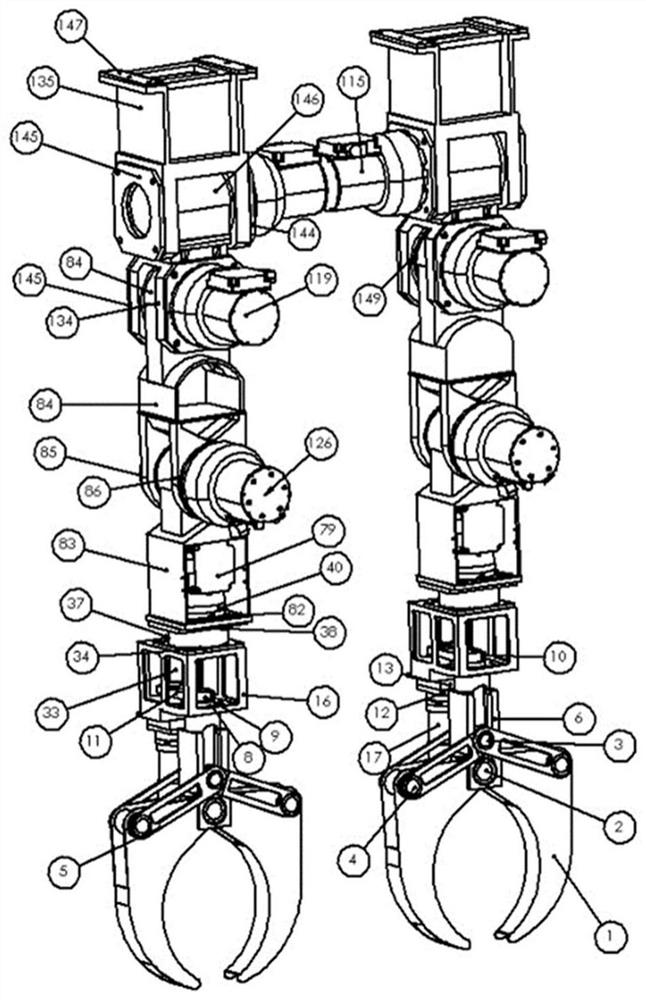
[0046] Such as figure 2 As shown, the dual robotic arm can be divided into shoulder joint (shoulder part), upper arm joint (big arm part), forearm joint (small arm part), wrist joint (wrist part), claw joint (claw part) five parts.
[0047] The shoulder part includes: shoulder joint motor-115, base-135, backing plate-147, bearing cover-145, transmission shaft 1-146, motor cover-144, spacer; The submersible (loaded object) is connected, the other end is connected with the base-135, the bearing cover-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com