Nonlinear ship course control model and control system
A course control and nonlinear technology, applied in the field of nonlinear ship course control model and control system, can solve the problems of large overshoot, slow response, weak robustness, etc., and achieve small overshoot, fast response and robustness strong effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
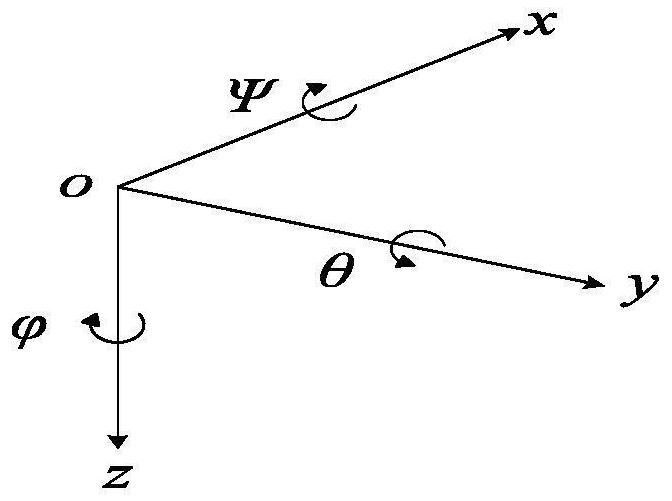
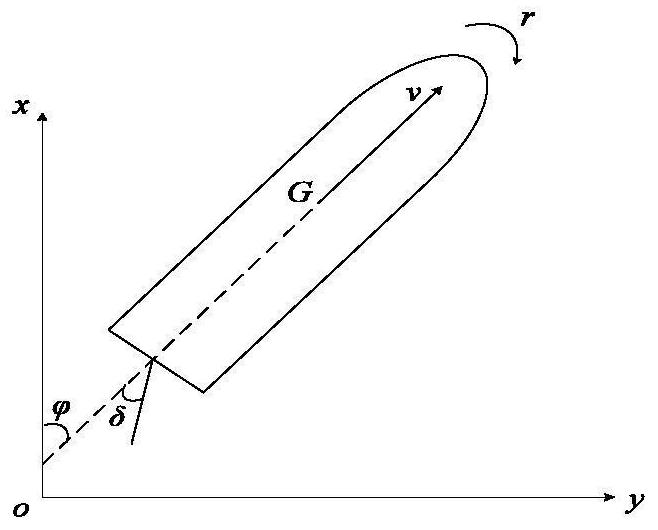
[0023] A nonlinear ship heading control model, based on fluid dynamics control equations including continuity equation, momentum equation, and state equation, combined with motion equations and state equations of ship heading and rudder angle, and using quadratic polynomials to simulate The high-order nonlinear mathematical model of the ship's rudder angle is established by a combined method, and then the sliding mode variable structure control theory is used to obtain a suitable switching surface and a stable sliding mode equation of motion, and the nonlinear mathematical model of the ship's rudder angle is regarded as As a kind of affine nonlinear system, the sliding mode variable structure controller structure of the nonlinear mathematical model of the ship's course and rudder angle is solved, so as to realize the simultaneous control of the two state...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com