Magnetic adsorption type wall-climbing robot chassis and magnetic adsorption type wall-climbing robot
A wall-climbing robot and magnetic adsorption technology, which can be used in motor vehicles, transportation and packaging, etc., can solve the problems of poor adaptability, tilted base, etc., and achieve the effect of strong adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0060] In this embodiment, the chassis of the magnetic adsorption wall-climbing robot includes only one chassis module.
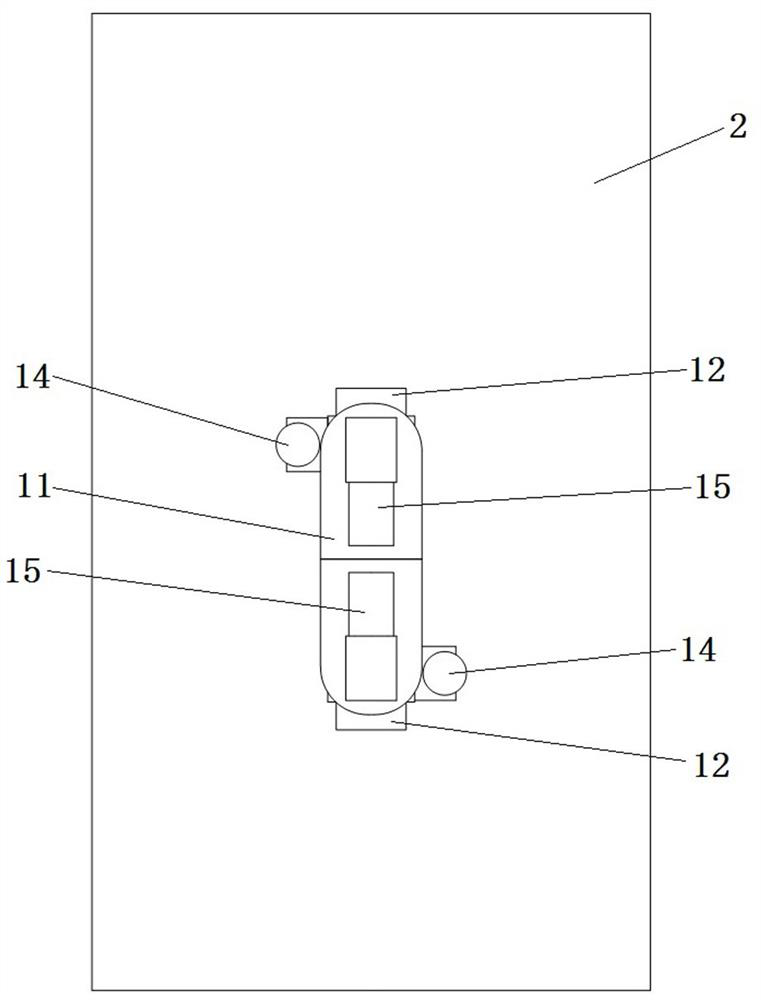
[0061] like Figure 1-Figure 3 As shown, the chassis module 1 includes a base 11, the base 11 is T-shaped as a whole, includes two wing plates and a separator located on the same side of the two wing plates, and a wheel frame 13 is mounted on each of the two wing plates of the base 11. The wheel frame 13 is separated from the two sides of the separator, and the rotation axes of the two wheel frames 13 are parallel to each other; the two wheel frames 13 are equipped with rollers 12, and the rollers 12 are magnetic rollers; a power motor 14 is also installed on the two wheel frames 13 , the output shaft of the power motor 14 is directly connected with the rotating shaft of the roller 12, and is used to drive the roller 12 to rotate; a steering motor 15 is respectively installed on the side of the two wing plates facing away from the separator, and the steerin...
Embodiment 2
[0068] like Figure 8 and Figure 9 As shown, in this embodiment, the chassis of the magnetic adsorption type wall-climbing robot includes three chassis modules 101, and the structure of the three chassis modules 101 is the same as that of the chassis module 1 in Embodiment 1 of the above-mentioned magnetic adsorption type wall-climbing robot chassis. Same, no more details here.
[0069] The chassis in this embodiment climbs on the outer peripheral surface of the cylinder 103, and the cylinder 103 is a cylinder of ferromagnetic material and is cylindrical; the bases of the three chassis modules 101 are connected together by hinges 102 to realize Articulation of adjacent chassis modules 101 .
[0070] The chassis modules 101 are combined to form the chassis, so that the robot using the chassis can provide a greater carrying capacity, so as to adapt to working conditions that require high carrying capacity.
[0071] Figure 8 The chassis shown in , runs along the axial direc...
Embodiment 3
[0073] The difference with embodiment 1 is: as Figure 10 As shown, the wheel frame rotation shafts 4 of the two wheel frames protrude from the side of the wing plate facing away from the partition body. The chassis module is only equipped with a steering motor 3, and the steering motor 3 is installed on the base, and the axis of its output shaft is in line with the The axes of the two-wheel frame rotating shafts 4 are parallel, and the steering motor 3 drives the two-wheel frame rotating shafts 4 to rotate through the synchronous transmission belt 5, thereby realizing the synchronous steering of the two-wheel frames.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com