Improved second-order linear active disturbance rejection permanent magnet synchronous motor control method
A technology of permanent magnet synchronous motor and active disturbance rejection controller, which is applied in the direction of motor generator control, AC motor control, electronic commutation motor control, etc., and can solve the problem that the PI controller is difficult to meet the control requirements.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0090] The embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings.
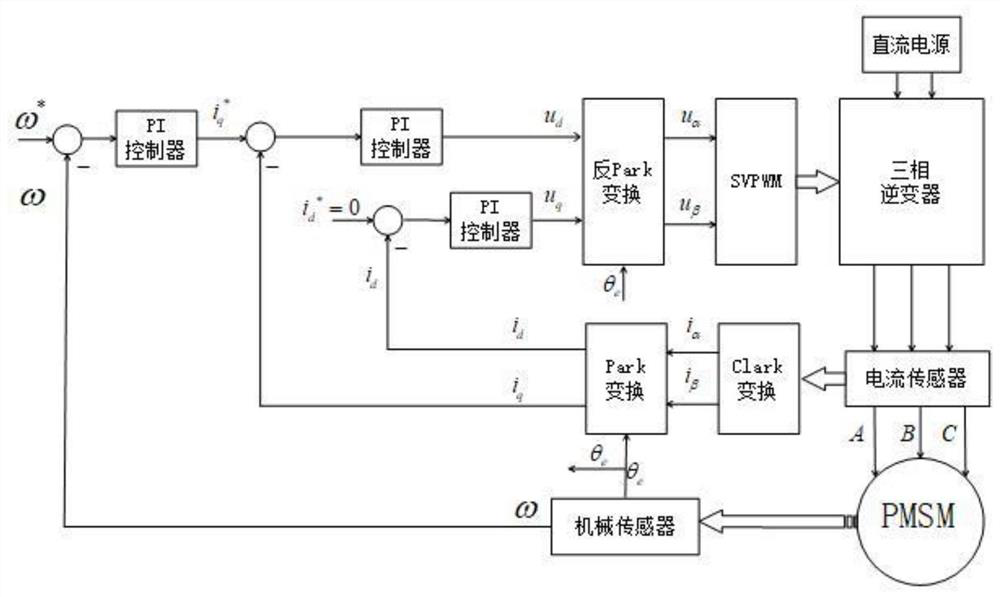
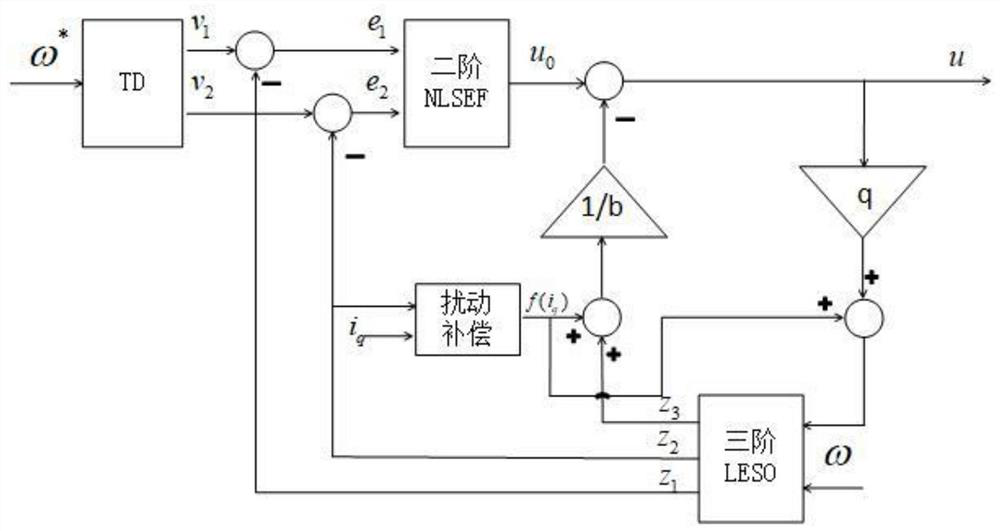
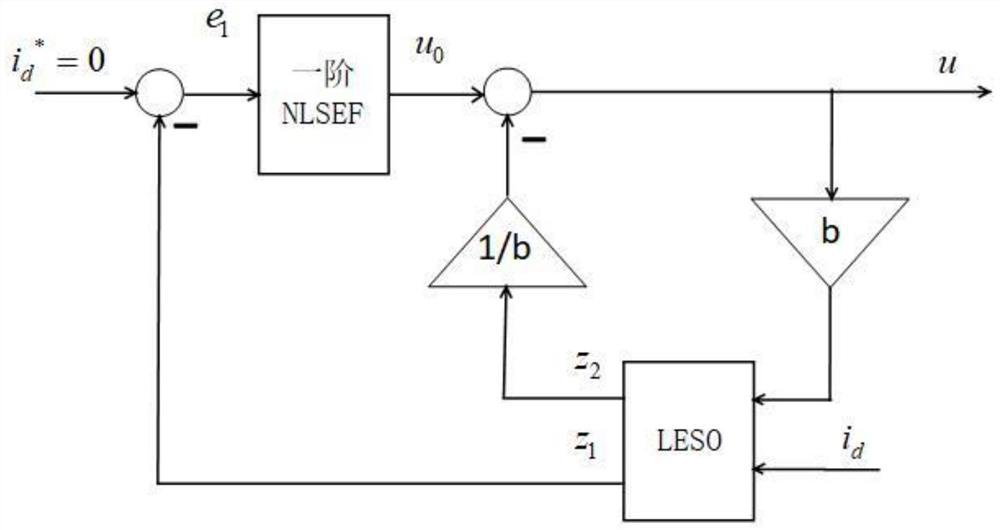
[0091] refer to Figure 2-4 , an improved second-order linear active disturbance rejection permanent magnet synchronous motor control method, the specific implementation of the process steps is as follows:
[0092] Step 1) Set the reference speed for the system through the main control chip DSP28335. The reference speed required to be set is below the rated speed of the PMSM. The setting accuracy of the reference speed can be set according to the speed sensor and the sampling period of the speed sensor. The control period of the speed loop and the current loop is generally longer than the control period of the current loop.
[0093] Step 2) Arrange a reasonable transition process for the set reference speed, so as to obtain a smooth reference input signal and extract the corresponding differential signal; and adjust the speed factor in the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com