Auxiliary automatic driving system and method for modern rail cleaning vehicle
A technology for autonomous driving and cleaning vehicles, applied in cleaning methods, track cleaning, construction, etc., can solve problems such as insufficient precision and the inability of assisted driving systems to be mounted on track cleaning vehicles, achieving high precision, rapid calculation, and good cleaning effect. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
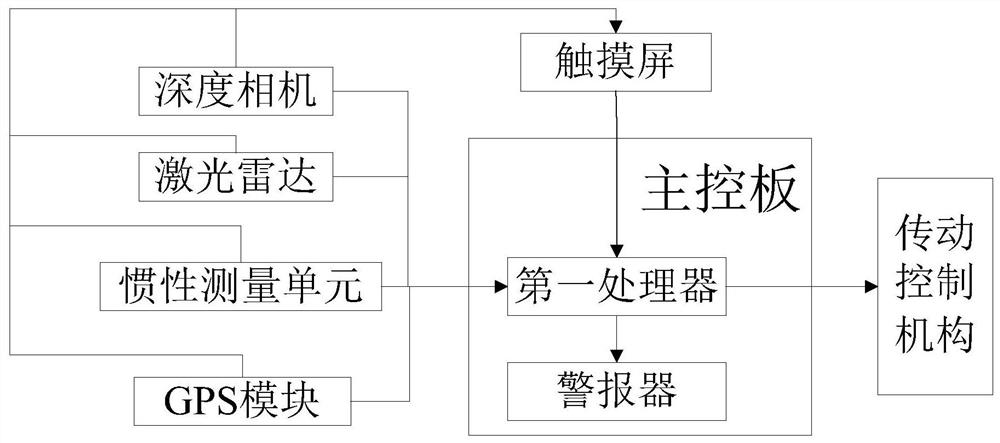
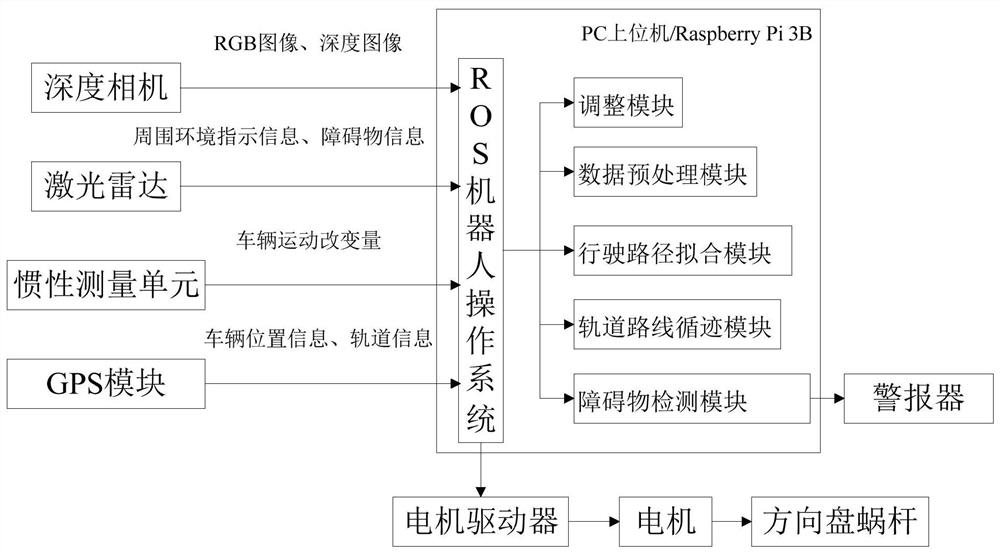
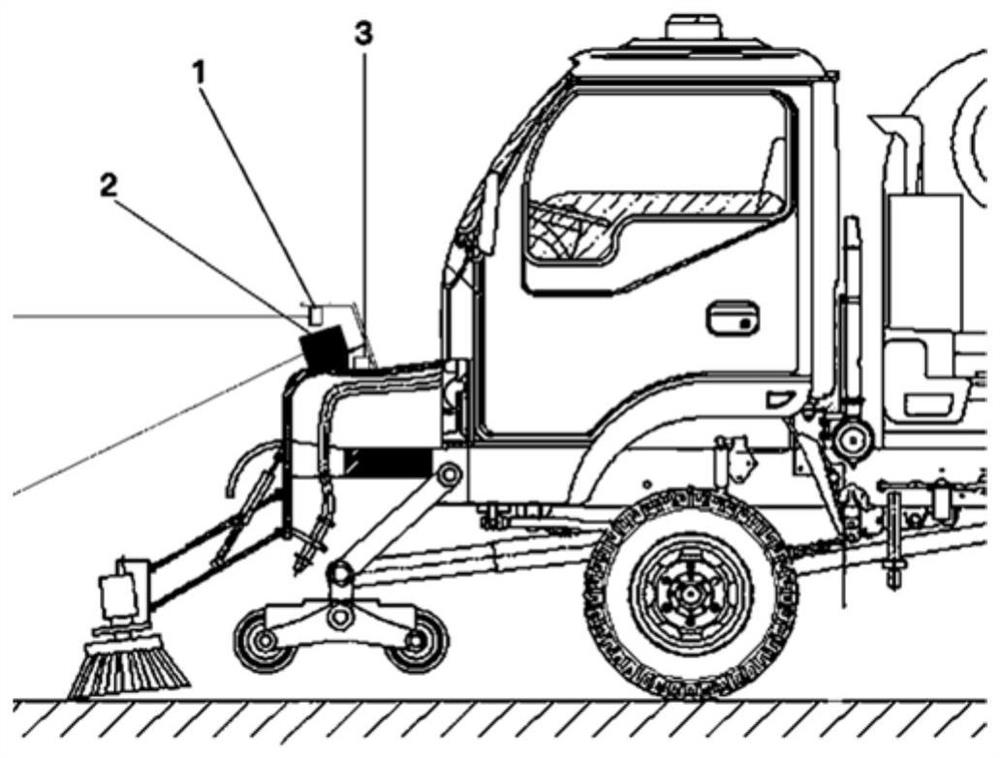
[0071] Such as figure 1 As shown, the present embodiment provides a modern track cleaning vehicle assisted automatic driving system, which is developed based on ROS. Camera 1, laser radar 2 for collecting information on the boundary points of the orbit and its surrounding environment, inertial measurement unit 3 (IMU) for collecting the three-axis attitude angle, angular rate and acceleration of the object, and GPS for obtaining the orbit position and direction Module 4, a main control board for performing steering control processing based on the collected data obtained by the depth camera 1, laser radar 2, inertial measurement unit 3, and GPS module 4, and detecting obstacles based on the distance and orientation of obstacles. The transmission control mechanism that receives the steering control command sent by the main control board for transmission. The surrounding environment indication information includes the state and color of objects such as lane lines and traffic lig...
Embodiment 2
[0091] Such as Figure 7 As shown, the present embodiment provides a method for assisting automatic driving of a modern rail cleaning vehicle, the method comprising the following steps:
[0092] Initial adjustment steps: initialize the position of the cleaning vehicle, calibrate the initial data and position of the depth camera 1 and the laser radar 2, and calibrate the GPS module 4;
[0093] Data collection steps: Obtain the direction of the track through the GPS module 4, collect three-axis data through the inertial measurement unit 3, collect the RGB image, depth image and surrounding environment indication information of the track through the depth camera 1, and collect the track and its surroundings through the laser radar 2 Environmental boundary point information. In practical applications, the three-axis data includes the forward direction of the carrier based on the inertial measurement unit, the acceleration data and angular velocity data of the three axes perpendic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com