Climbing robot for planet surface detection and using method thereof
A technology of robots and star catalogues, which is applied in the field of climbing robots for star catalogue detection, and can solve the problems of escape, slow movement speed, and difficulty in movement control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
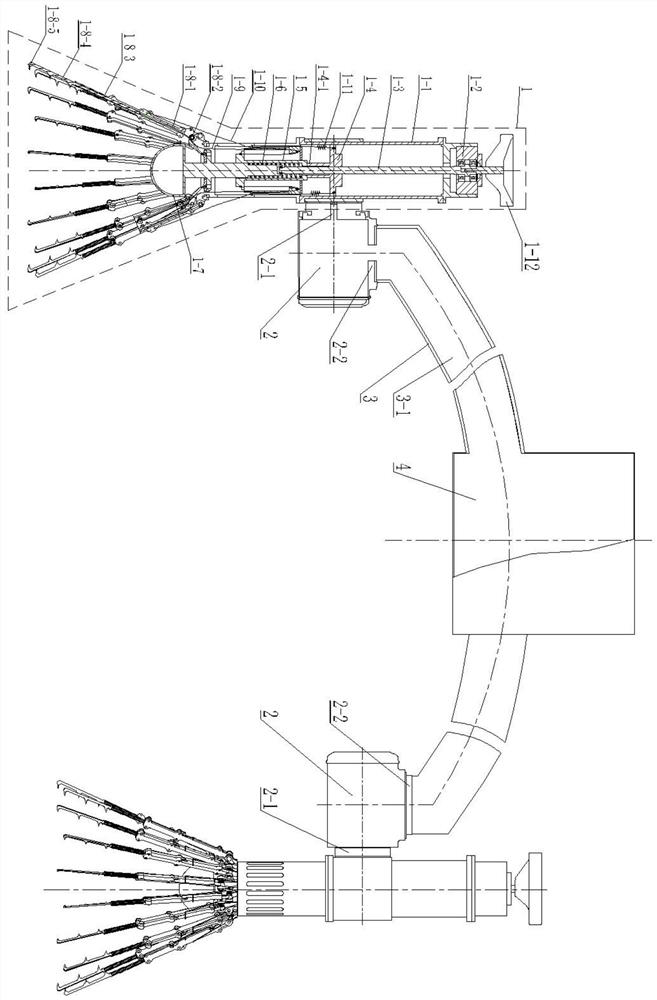
[0030] Specific implementation mode one: see Figure 1-4 This embodiment will be described. The climbing robot for star exploration described in this embodiment includes two identical grasping mechanisms 1, two identical double-ended output joints 2, a section of hollow shape memory alloy 3 and an instrument platform 4, the instrument platform 4 The instrument platform 4 is fixedly connected to the middle part of the shape memory alloy 3, and the two ends of the shape memory alloy 3 are respectively fixedly connected to the second output ends 2-2 of the two double-ended output joints 2, and the first output of the double-ended output joint 2 The end 2-1 is fixedly connected with the grasping mechanism 1;
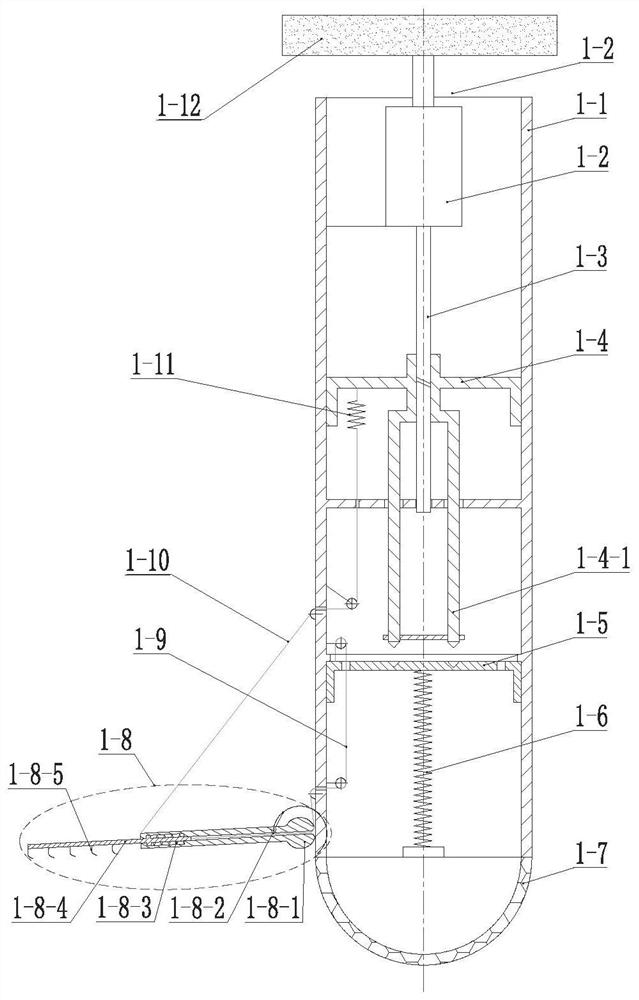
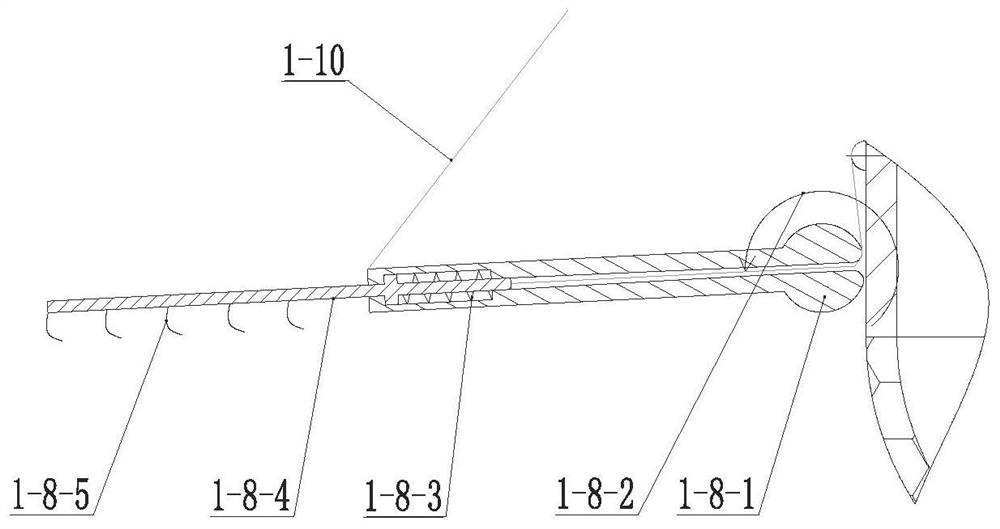
[0031]The grasping mechanism 1 includes a housing 1-1, a motor assembly 1-2, a lead screw 1-3, a lead screw nut 1-4, a lead screw nut top 1-4-1, a piston 1-5, and a piston recovery spring 1-6, a flexible contact ball 1-7, a plurality of flexible fingers 1-8, a pull-down ro...
specific Embodiment approach 2
[0034] Specific implementation mode two: see Figure 1-4 This embodiment will be described. The use method of the climbing robot for star catalog detection: when the climbing robot moves, it is realized through the cooperation between two grasping mechanisms 1, two double-ended output joints 2, and a shape memory alloy 3, one of which grasps The attachment mechanism 1 forms the grasping mechanism, and the other grasping mechanism 1 grasps and releases the grasping mechanism. The output end 2-2 of the double-ended output joint 2 adjusts the posture, and then the shape memory alloy 3 is powered on and deformed. The mechanism performs grasping; after the grasping is completed, the other grasping mechanism 1 releases the grasping and repeats the above action; through the coordination and cooperation between the two grasping mechanisms 1 and the shape memory alloy 3, the movement of the climbing robot is realized.
specific Embodiment approach 3
[0035] Specific implementation mode three: see Figure 1-4 This embodiment will be described. The method of using the climbing robot for star catalog detection: when the climbing robot takes samples, when using flexible fingers 1-8 to grab and sample, one of the grasping mechanisms 1 is fixedly connected to the star chart, and the other grasping mechanism 1 The sampling target is grasped, and the sample is enveloped by multiple flexible fingers 1-8 to realize grasping and sampling.
[0036] In addition to the mobile function, the climbing robot for star chart detection also has two sampling methods, one is to use the flexible fingers 1-8 of the gripping mechanism 1 to grab and sample; the other is to use the gripping mechanism 1 Grinding samples were performed on grinding wheels 1-12. When using flexible fingers 1-8 to grasp and sample, the working process is similar to the process of grasping the star chart. One of the grasping mechanisms 1 is fixedly connected to the star ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com