All-terrain picking robot
A picking robot and all-terrain technology, applied in picking machines, manipulators, harvesters, etc., can solve the problems of lack of mature commercial products and few applications
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
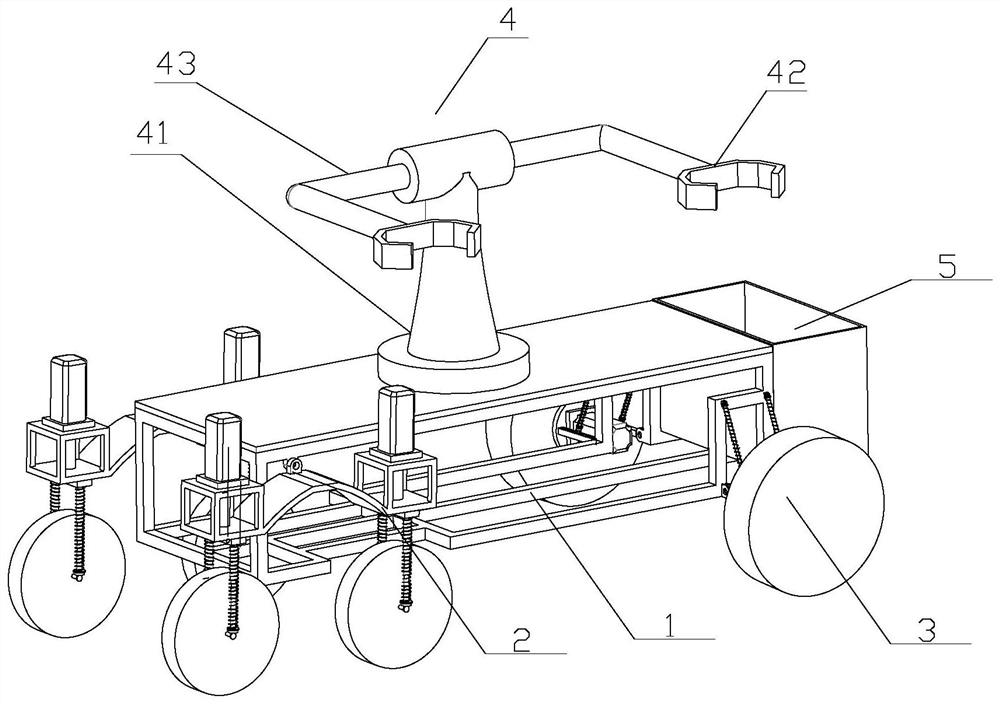
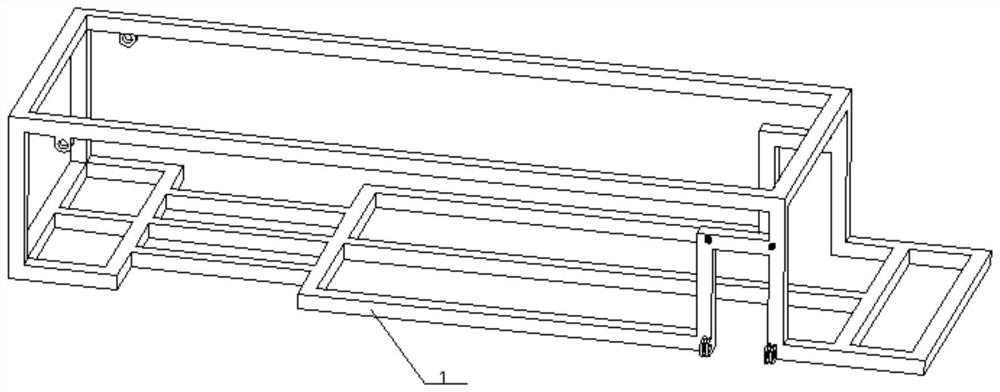
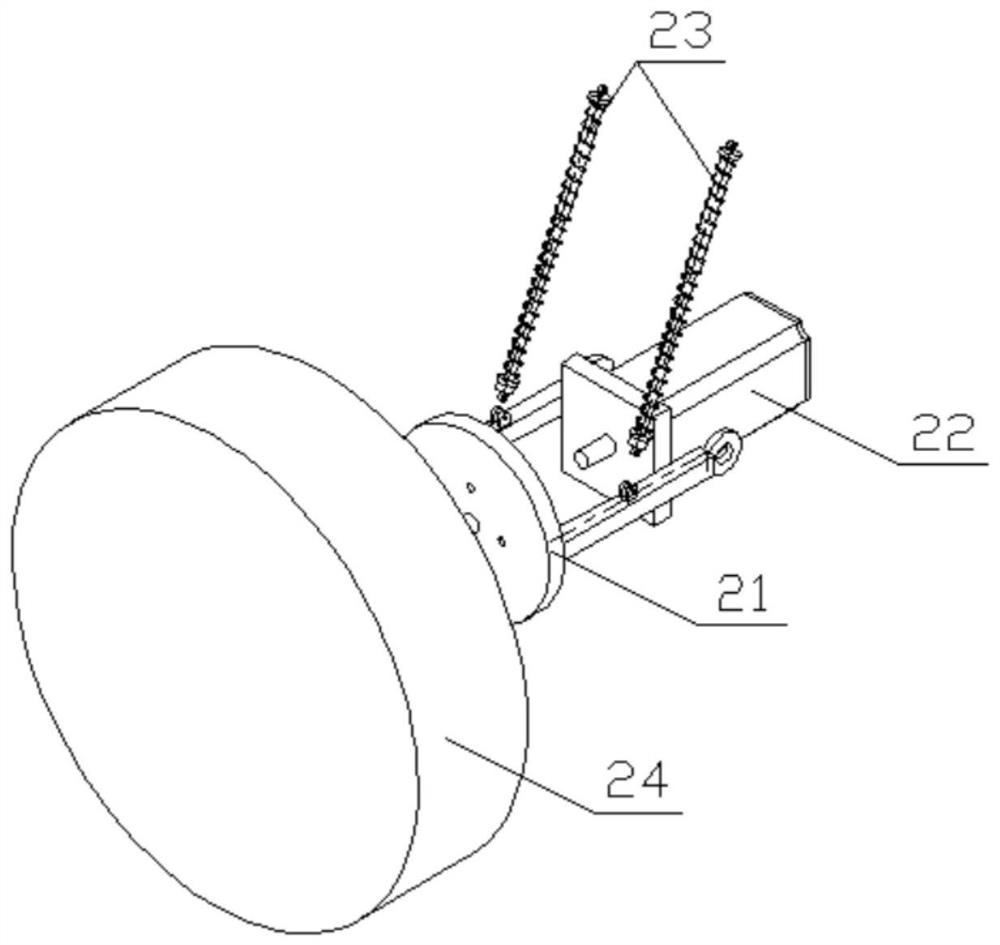
[0039] Such as figure 1 Shown, a kind of all-terrain picking robot comprises vehicle frame 1, two rear drive assemblies 2, two front axle assemblies 3, manipulator assembly 4, control module and power supply module, the rear portion of described vehicle frame 1 and Rear wheels 24 and independently driven front wheels 32 are respectively arranged on both sides of the front, and the rear wheels 24 are connected to the rear of the vehicle frame 1 through the corresponding rear drive assembly 2, and the front wheels 32 The corresponding front axle assembly 3 is flexibly connected to the front portion of the vehicle frame 1, and when the robot walks on a potholed road, the front wheels 32 drive the front axle assembly 3 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com