AUV state monitoring method based on dynamic model and complex network theory
A complex network and dynamic model technology, applied in the field of abnormal state monitoring of underwater robots, can solve problems such as difficulty in solving, non-convergence of model parameters, and limitations.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0048] In order to understand the above-mentioned purpose, features and advantages of the present invention more clearly, the present invention will be further described below in conjunction with the accompanying drawings and embodiments. Many specific details are set forth in the following description to facilitate a full understanding of the present invention. However, the present invention can also be implemented in other ways than those described here. Therefore, the present invention is not limited to the specific embodiments disclosed below.
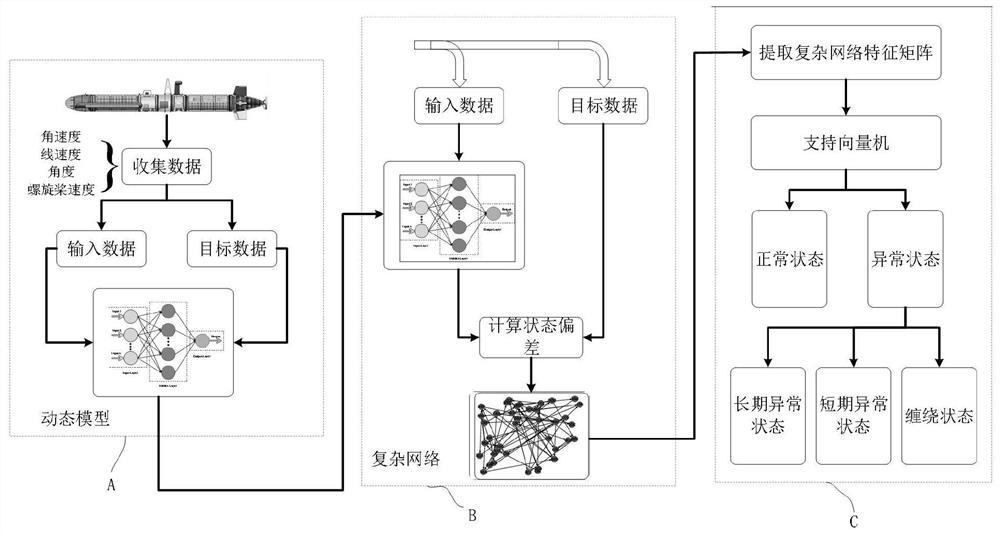
[0049] A AUV state monitoring method based on dynamic model and complex network theory, such as figure 1 shown, including the following steps:
[0050] Step A, model parameter identification: firstly simplify the dynamic model of the AUV and convert it into a multi-parameter simplified model with constraints; use the neural network to perform parameter identification on the multi-parameter simplified model to obtain an accurate mod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com