Multi-time-lag nonlinear system sliding mode prediction fault-tolerant control method under sensor faults
A technology for sensor faults and nonlinear systems, applied in program control, general control systems, electrical testing/monitoring, etc., to achieve the effects of ensuring search capabilities, ensuring balance, and accelerating convergence speed and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0135] The present invention will be further explained below in conjunction with the accompanying drawings.
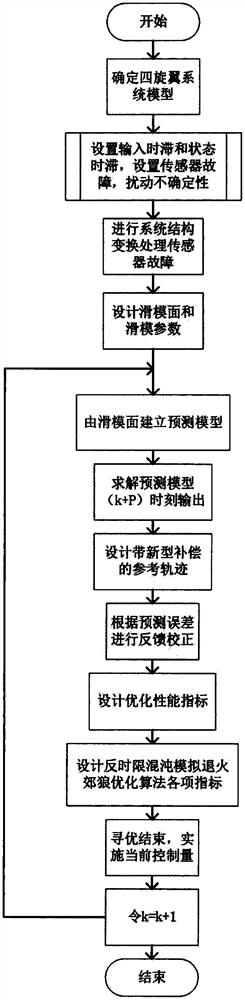
[0136] Such as figure 1Algorithm implementation process. The algorithm is designed according to the characteristics of the system. Firstly, the fault quantity is added to the system state quantity through the system structure transformation to deal with the sensor failure; then, the quasi-integral sliding mode surface is designed as a prediction model to ensure that the system state trajectory starts from the initial The state is on the sliding surface; then the double power function is designed as the reference trajectory, and the fault and disturbance uncertainty compensation are considered to effectively suppress the harmful effects of the time delay on the system, so that the fault-tolerant control accuracy is improved; finally, the design is based on the inverse time limit The rolling optimization step of the coyote algorithm optimized by chaotic simulated anneali...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com