A smart vehicle motion control method for protecting human-ground collision damage
A motion control and human protection technology, applied in vehicle parts, transportation and packaging, vehicle safety arrangements, etc., can solve problems such as increasing the risk of human-ground collision damage, and achieve the effect of protecting human-ground collision damage.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The accompanying drawings are for illustrative purposes only and cannot be construed as limiting the patent;
[0024] The technical solution of the present invention will be further described below in conjunction with the embodiments.
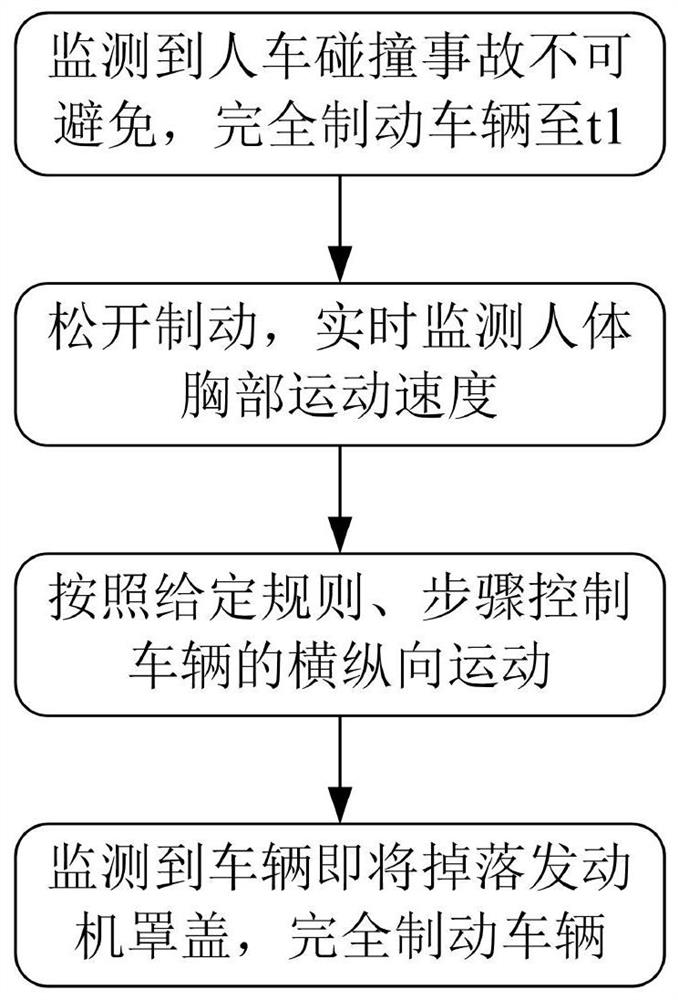
[0025] For a smart car, when it detects that a potential collision with a pedestrian is unavoidable, the vehicle is fully braked until the moment t1 when the head of the human body collides with the car body for the first time.
[0026] After time t1, the vehicle brake is released, and the movement speed of the human chest in the x and y directions is monitored in real time, and then the differences e1 and e2 between the human chest speed and the vehicle movement speed in the x and y directions are calculated.
[0027] In the x direction, when e1 is positive, the vehicle is accelerated, and the acceleration value is 1m / s2; when e1 is negative, the vehicle is decelerated, and the acceleration value is -1m / s2; when e1 is zero, the vehicle ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com