Topological map node generation method based on laser point cloud distribution characteristics
A technology of distribution characteristics and topological map, applied in the field of robotics, can solve the problems of visual sensor lighting, limited measurement range, and inability to work at night, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
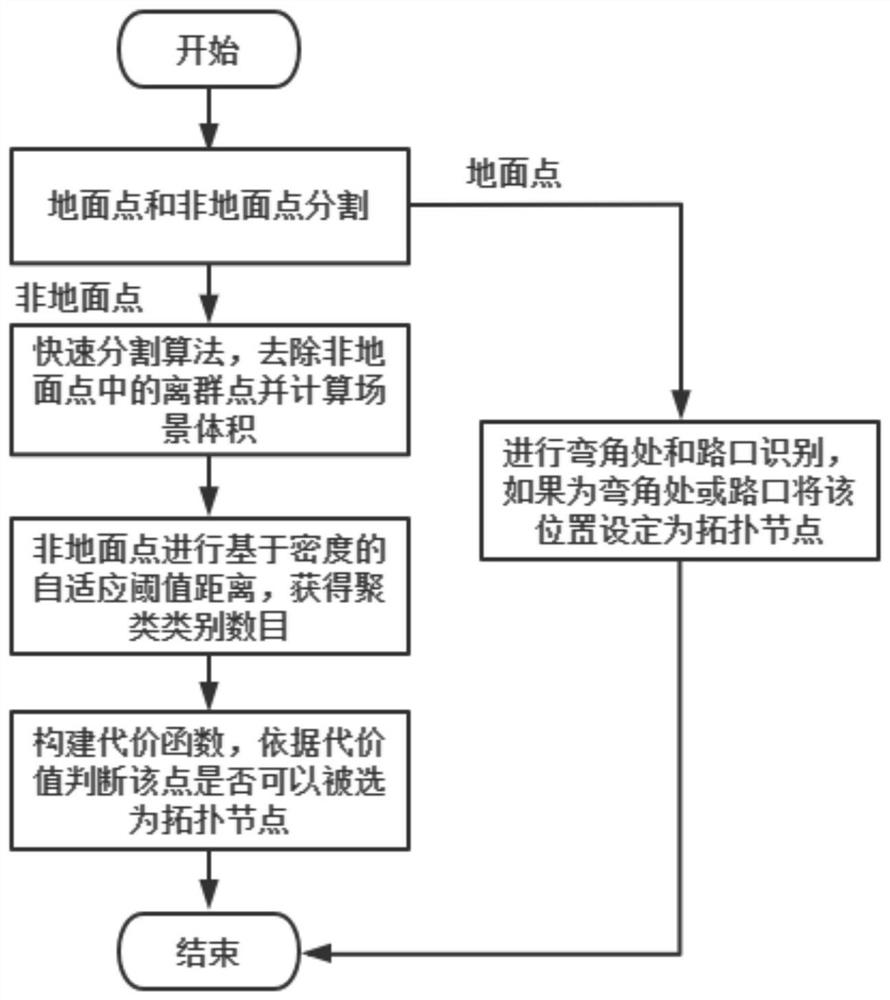
[0035]The technical solution of the present invention will be further described below in conjunction with specific embodiments and accompanying drawings, and the flow chart of the technical solution of the present invention is as follows figure 1 shown.
[0036] In the specific implementation process of the present invention, a 16-line three-dimensional laser sensor is used to generate a three-dimensional point cloud with a frequency of 10 Hz, a scanning range of 360° in the horizontal direction, and a resolution of 0.2°, and a scanning range of 30° in the vertical direction with a resolution of 2°. , each laser line is 1800 points, and the 3D laser sensor outputs 288,000 3D laser points per second, such as figure 2 shown.
[0037] A method for generating topological map nodes based on laser distribution characteristics, the steps are as follows:
[0038] (1) Segmentation of ground points and non-ground points
[0039] Since the 3D laser sensor is installed horizontally, o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com