Method for recognizing human body sewing actions by robot
A technology for identifying human bodies and robots, which is applied in the field of robot visual recognition, can solve the problems of high delay and low accuracy of sewing action recognition, achieve improved response speed, good task learning effect, and solve the effects of poor dynamic real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0043] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
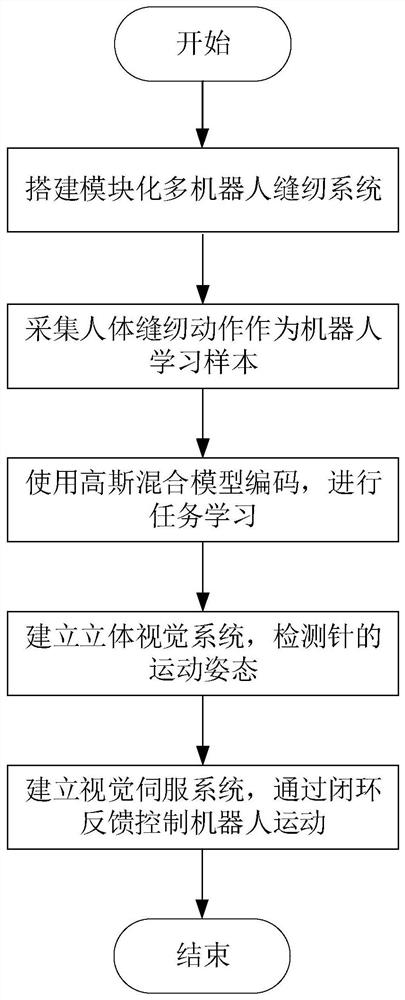
[0044] A flow chart of a method for a robot identifying a human sewing action in the present invention, as figure 1 As shown, the specific implementation steps are as follows:
[0045] Step 1. Build a modular multi-robot sewing system, which includes an interconnected two-hand sewing system, a stereo vision system, and a visual servo system;
[0046] The present invention applies the method of robot recognition of human sewing movements to the existing intelligent system of sewing robots, and uses a robot based on stereo vision to recognize human sewing movements. First, a modular multi-robot sewing system is built, and the modular multi-robot The stereo vision system of the sewing system includes two cameras with different angles, the visual information is obtained through the cameras, and the visual information is controlled and fed back t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com