Accurate parking method for urban rail transit station
A technology for urban rail transit and stations, applied in railway traffic management, railway car body components, railway signaling and safety, etc., can solve problems such as difficulty in reaching, inaccurate and insufficient detection of speed and deceleration, and short commissioning time Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The embodiments of the present invention will be described in further detail below with reference to the accompanying drawings.
[0039] The present invention provides a precise parking method for an urban rail transit station, which is based on using two train control curves to complete precise parking;
[0040] The ATO (Auto Train Operation) subsystem is an important subsystem in the urban rail transit ATC (Auto Train Control) train control system. It mainly completes the automatic driving of the train. One of the important functions is to automatically control the train to stop accurately at the station.
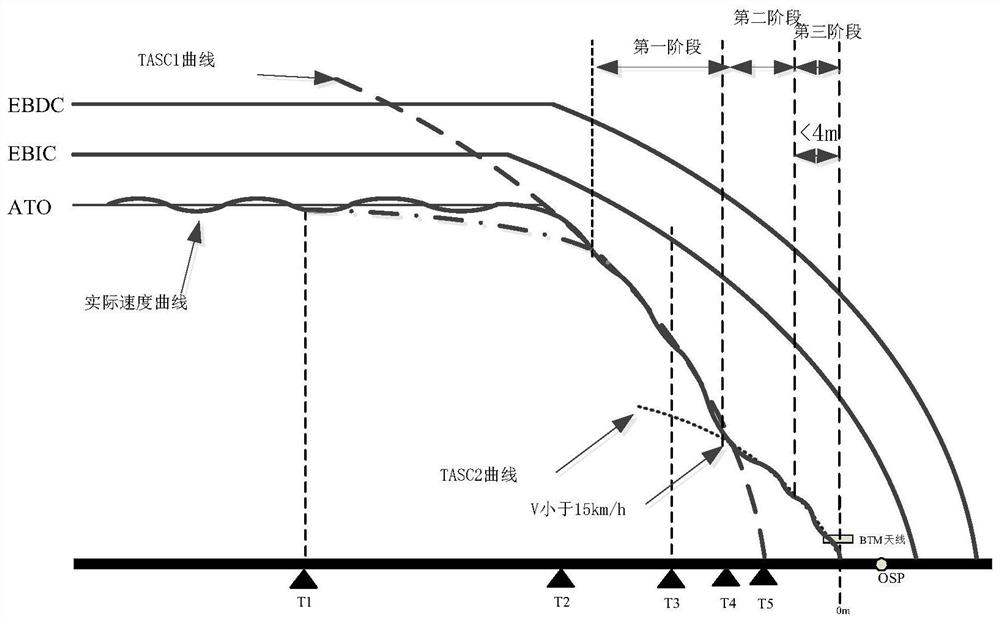
[0041] The method is divided into three stages:
[0042] TASC (Train Automatic Station Control) is divided into the first stage, the second stage and the third stage, such as figure 1 shown. EBDC is the emergency braking deceleration curve, EBIC is the emergency braking trigger curve, OSP (operating stop point) is the position of the front of the car when the act...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com